Adoption of the Urban Air Mobility System: Analysis of technical, legal and social aspects from a European perspective
Laura Babetto[1], Ansgar Kirste[1], Jingshu Deng[1], Michael Husemann[1] and Eike Stumpf[1] [1]Institute of Aerospace Systems, RWTH Aachen, Aachen, Germany
Abstract: As the demand for mobility and traffic in European urban areas continues to grow, innovative transportation solutions, particularly Urban Air Mobility (UAM), are gaining increasing prominence. UAM takes advantage of the third dimension to reduce ground traffic by integrating low-noise electric vertical take-off and landing vehicles (eVTOLs). Nonetheless, the successful implementation of UAM necessitates not only technological advancements but also the legal framework and social considerations to guarantee effective and safe operations. Holistic investigations of UAM are scarce, especially in the European context. Therefore, this study discusses the developments and challenges of UAM from technical, legal, and social perspectives and derives a set of UAM-tailored design drivers for the effective deployment of UAM in Europe. A comprehensive literature review is conducted on the state of the art of UAM technologies, regulations, and public attitudes. Various eVTOL configurations are compared, taking into account pertinent system factors such as energy efficiency and suitability for short- or long-duration missions. Besides, the cost-effectiveness of eVTOL configurations for a specific mission is evaluated through a cost-optimization analysis: the total cost is calculated to be around 2 € per payload-kilometer, which is approximately tenfold the current price for road transport. The regulatory activities of the European Union Aviation Safety Agency are discussed for the period 2017-2022, during which several systematic improvements to the regulations have been introduced. Typical factors for assessing the public acceptance of UAM are identified, and a survey is conducted across European medium-sized cities to gain insights into public opinion. The survey results indicate that 59% of the respondents are moderately positive toward UAM deployment, representing a more cautious attitude compared to findings from studies conducted in metropolitan cities or countries. Furthermore, 56% of respondents are willing to try out delivery services with aerial vehicles, while, 32% would use air taxis. This is in contrast with studies conducted in metropolitan areas or at the country level. Based on the proposed holistic investigation of UAM, the set of design drivers can be identified to reduce uncertainty in UAM adoption and ensure a flawless deployment.
Keywords:Urban Air Mobility (UAM);legal framework;eVTOL configurations;public acceptance;Europe Citation:Babetto, L., Kirste, A., Deng, J., Husemann, M., and Stumpf, E. (2023). Adoption of the Urban Air Mobility System: Analysis of technical, legal and social aspects from a European perspective. Journal of the Air Transport Research Society 1(1): 152-174 DOI:https://dx.doi.org/10.59521/C97BE694514DD2FE Download:PDF
1 Introduction
The increase in ground traffic within urban environment coincides
with the growth of the population living in cities, which also expands
the need for connections and delivery services (Schuh et al. 2022; Berger
2022). Urban Air Mobility (UAM) is the term used to describe the
aviation sector that deals with the transportation of people and cargo
within urban and suburban regions. The implementation of UAM has the
potential to enhance connectivity and alleviate congestion in urban
areas, making it a highly promising solution to address the ongoing
challenges of urbanization. The development of electric Vertical
Take-Off and Landing (eVTOL) vehicles is receiving substantial attention
and investment as an integral part of the UAM system. The eVTOLs aim to
foster sustainability and are well-suited for urban environments as the
capability for VTOL allows them to operate in densely populated areas,
where space is limited.
A large number of start-ups and established companies, as well as
research organizations, are developing and testing eVTOL vehicles and
related technologies, while the UAM sector is still in its early stages
(Sun et al. 2021; A. P. Cohen,
Shaheen, and Farrar 2021). Uber, Airbus, and Boeing, among
others, have made significant investments in creating UAM infrastructure
and designing vehicles that succeed in all three dimensions of
sustainability, namely environmental conservation, economic development,
and social sustainability (Bauranov and Rakas 2021). In 2019, the European
Commission launched the Green Deal (European Commission and EASA
2019) to call for the implementation of climate-neutral solutions
by 2050. This target also applies to the aviation sector and therefore
to UAM (Organization for
International Economic Relations 2020). On the way to a
sustainable UAM sector and the fulfillment of the requirements of
operating in an urban environment, the design space is still open.
Partly due to a large number of potential missions and partly due to the
ongoing research and development in the field, no superior and/or
preferred design solution has yet been identified. The exploration of
the UAM design space leads in most cases to eVTOLs. Depending on the
missions to be flown, different configurations may be considered, such
as multicopters, tiltwing or propulsive aircraft, or hybrid
configurations (Kraenzler, Schmitt, and Stumpf 2019; Sun
et al. 2021). The deployment of UAM is relatively rapid, which in
turn raises concerns about the early stages of regulation, the
technological maturity of eVTOL, and the necessary public acceptance,
which are highly correlated with the successful implementation of UAM
(Organization for International
Economic Relations 2020; Babetto, Kniebel, and Stumpf 2022; Anna
Straubinger et al. 2020; Sells 2022). In this context, the UAM -
more precisely defined as a whole as a UAM system - has to be analyzed
and evaluated on the basis of three main aspects: the UAM
system is divided into technical, legal and
social aspects respectively (Figure 1).
Figure 1: Description of UAM system aspects.
Technical aspects encompass performance, safety, cost, and operation.
For example, UAM-eVTOLs are designed to be compact and capable of flying
along pre-defined routes in semi- or fully autonomous mode with minimal
emissions and noise (Berger 2022; Babetto and
Stumpf 2021; A. P. Cohen, Shaheen, and Farrar 2021). The legal
aspect includes the regulatory framework (Mitchell et al. 2022; Bauranov and Rakas 2021; Anna
Straubinger et al. 2020). Authorities such as the European
Aviation Safety Agency (EASA) are working to establish standards and
rules for the safe operation of UAM vehicles. This is essential, as
eVTOLs operating in urban environments are currently not subject to any
specific restriction (Schuh et al. 2022). The social aspect is
concerned with how eVTOLs operate in urban environments as a novel
technology, which will have a direct impact on technology diffusion and
the market success of the UAM service as a business (Garrow, German, and Leonard 2021;
Ahmed et al. 2023). This is particularly the case because UAM
operation raises concerns for society, including noise, safety, and
privacy (NASA 2018;
Kellermann, Biehle, and Fischer 2020; Dannenberger et al. 2020; Anna
Straubinger et al. 2020; Sells 2022; Bauranov and Rakas 2021). In
order to study concerns as well as the benefits that UAM can bring, a
survey is conducted as it is the most common method to collect public
perceptions toward new technology by efficiently gathering data from a
large number of participants and providing quantifiable results (Pettke et al.
2021). The survey target is medium-sized cities since it was
identified as a research gap in this field. In fact, currently available
surveys about UAM are either focused on big cities or worldwide
countries (NASA
2018; EASA 2021c; R. Rothfeld et al. 2021; Ahmed et al. 2023; Yedavalli
and Mooberry 2019; Fu, Rothfeld, and Antoniou 2019). Furthermore,
medium-sized cities have been identified as a key target group for UAM,
as they represent the majority of the European population and are a
potential area for economic growth and mobility improvement (Giffinger et al. 2007).
In this paper, the interrelationship among these aspects is
addressed, as they are not independent of each other, but rather
intertwined (Berger 2022; Garrow, German, and
Leonard 2021; Bauranov and Rakas 2021). As most of the published
studies dealing with the topic do not cover it in a holistic way, a
holistic analysis of the UAM system will be carried out with regard to
the three aspects - with special attention to the European scenario
(Clothier
et al. 2015; Cyber 2018; Pettke et al. 2021; Slovic, Fischhoff, and
Lichtenstein 1982). This way, the knowledge base, and
understanding will be extended. Based on this, challenges, priorities,
and opportunities within the UAM system can be identified and new design
drivers can be derived that need to be aligned with stakeholder and
public needs as suggested by similar works in (Johnson, Miller, and Conrad 2022;
Tepylo, Straubinger, and Laliberte 2023). In order to achieve a
holistic analysis of UAM systems with respect to the three aspects,
first each aspect is examined independently and then their
interrelationship is discussed. Finally, their overall impact on the UAM
system can be outlined and future actions can be proposed. In this work,
the research is guided by the following objectives:
Analyse the main characteristics of the technical, legal, and
social aspects of the UAM system.
Identify the current challenges of each aspect.
Interrelate the identified characteristics and/or
challenges.
Derive new design drivers resulting from the three aspects’
perspective.
Define a strategy for a flawless deployment of the UAM
system.
Delineate the pathway towards the adoption of a future UAM system
in Europe.
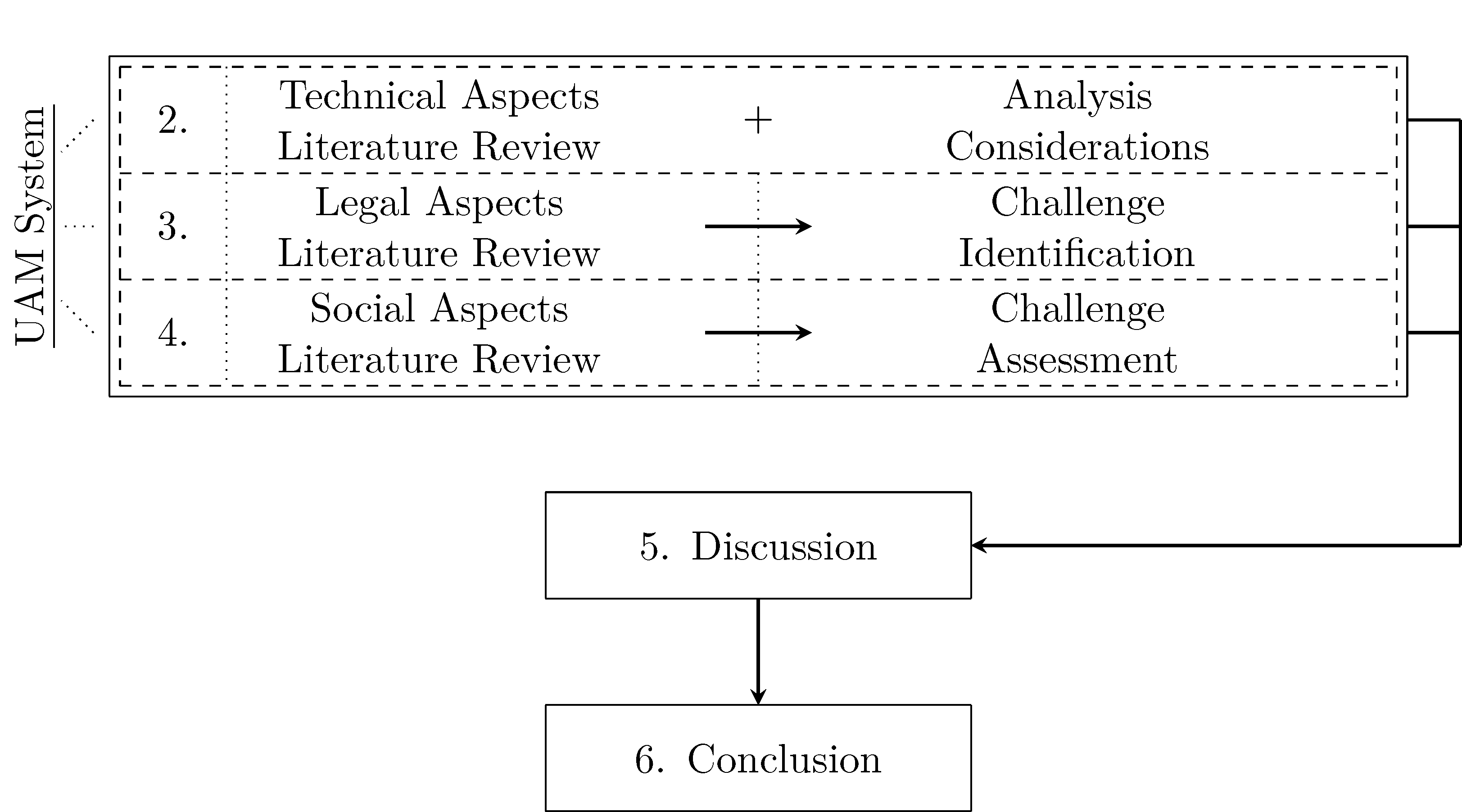
Following the introduction in Section 1, a
comprehensive literature review is carried out. The results of the
literature review are presented - according to the aspects of analysis
shown in Figure 1 - in three main sections: Section
2 to Section 4 (see Figure 2).
Section 2 presents the background of the UAM
service, i.e., provides a detailed description of the current vehicle
concepts designed for use in a future UAM scenario and discusses the
numerous potential configurations according to individual specifications
such as range, speed, and efficiency. This is done in order to determine
which design is most promising for the mission purpose. Section 3 presents the historical development of
the regulatory framework from 2017 to 2022, elucidating the rulemaking
activity that paves the way for the establishment of innovative UAM
technology. The UAV-specific safety assessment approach is also briefly
covered in this section. Section 4 deals with
the public acceptance of UAM. Recent statistical analyses on the social
acceptance of UAM are discussed and the results of an own survey on
public acceptance in medium-sized European cities are examined. The case
study of medium-sized European cities was chosen because the literature
review revealed a gap in this research field. In this way, it was
possible to obtain a more comprehensive picture of European acceptance
with regard to UAM. A comprehensive discussion of the technical
characteristics, the legal framework, and the public acceptance as well
as their interrelationships is provided in Section 5, giving the
basis for a future pathway of UAM from a European standpoint.
Conclusions are drawn in Section 6.
Figure 2: Structure of the paper.
2 Technical aspects of the UAM
system
A brief review of the technical aspects of the UAM system allows
stakeholders to gain a comprehensive understanding of the capabilities,
limitations, and potential impacts of UAM technology. This understanding
is fundamental for developing effective legal frameworks and regulations
that address, e.g., safety, noise, and integration within the manned
space associated with UAM (Bauranov and Rakas 2021; Sun et al. 2021). It
also aids in formulating social acceptance strategies by addressing
public concerns and ensuring that UAM systems are integrated
harmoniously into urban environments. The technological aspect of the
UAM service comprises, first, the vehicle concepts and, second, the
operating system with built infrastructure (Anna Straubinger et al. 2020; Garrow, German, and
Leonard 2021; Mitchell et al. 2022; Sun et al. 2021). On the one
hand, current vehicle concepts for use in UAM are presented in the
following section accompanied by an introduction on comparative methods
between UAM concepts based on the type of mission, i.e., inter- or
intra-city transportation services. On the other hand, an overall cost
evaluation of the operating UAM concepts based on the state-of-the-art
of operation management is given in Section 2.2 in order to assess the
cost-effectiveness of alternative transportation services.
2.1 UAM vehicle concepts
The enabler of the UAM system is the aerial vehicle concept.
Therefore, the design of the vehicle itself and related technologies
have to be discussed. Technological developments, such as the VTOL
capability and configuration layouts that differ significantly from
conventional aircraft, have provided the technical basis for the
emergence of UAM. Since approximately 2010, a large number of
manufacturers and research institutes have proposed various
configurations of UAM vehicle concepts, most of which are eVTOL vehicles
(A. P. Cohen, Shaheen, and
Farrar 2021; Sun et al. 2021; Ahmed et al. 2023). Studies have
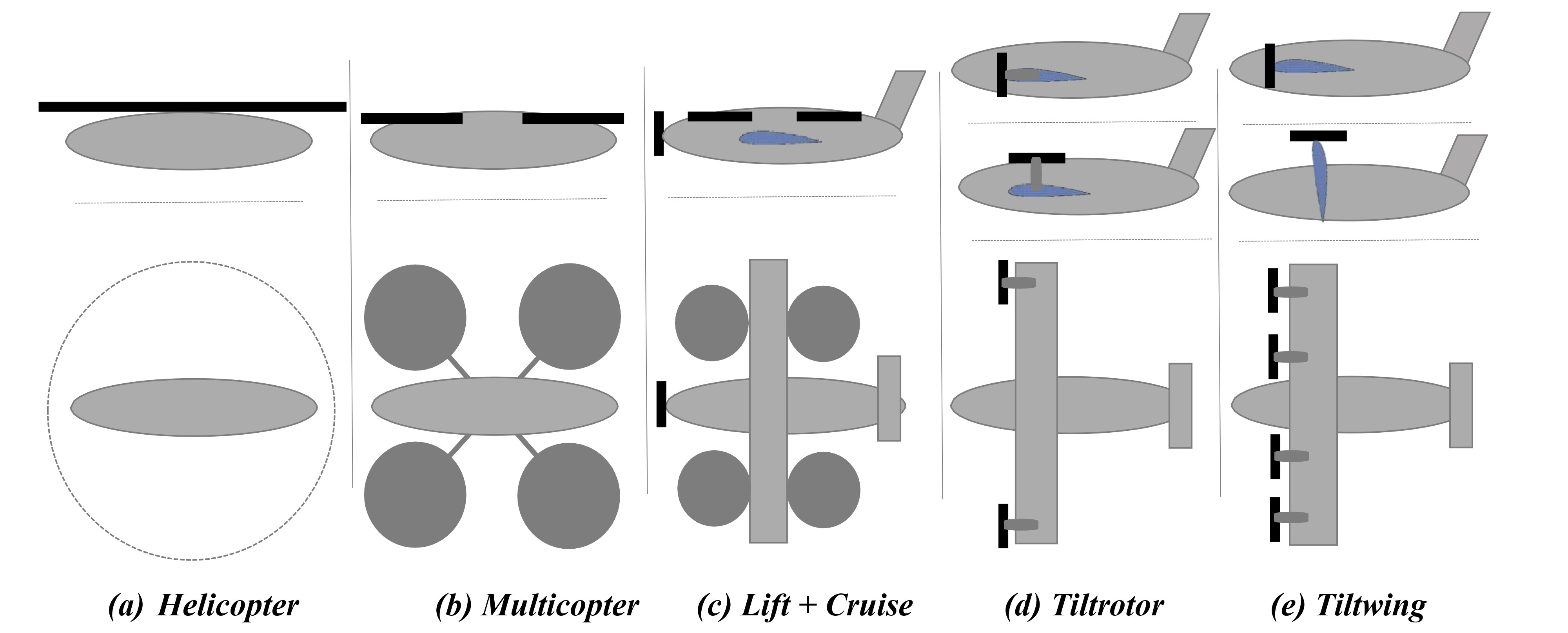
classified the unconventional layout of eVTOL vehicles into three main
classes (see Figure 3)
(Bacchini
and Cestino 2019; Bauranov and Rakas 2021; Babetto and Stumpf
2021):
Lift + Cruise,
Vectored thrust,
(Multi/Heli)copters,
Others.
The Lift + Cruise configuration relies on separate engine
units to achieve both VTOL capability and conventional cruise.
Typically, lift rotors provide vertical thrust for the VTOL phase, while
pusher propellers generate thrust for forward flight ((Giannini, Kaufman,
and Kearney 2018; Silva et al. 2018)). Vectored thrust
enables an aircraft to change the direction of thrust resp. lift force.
These vehicles achieve force vectoring by tilting the ducted fans or
rotor units or by tilting the entire wing with installed propulsor
units. For tilt-wing aircraft, the propulsor units are generally firmly
attached to the wing, and the direction of thrust is changed by rotating
the wing around the pitch axis. Whereas, in tilt-rotors, the direction
of the propeller’s shaft shifts to achieve a change in the direction of
thrust. Multicopters are mechanically simple VTOL layouts that
are suitable for urban operations due to their compact size (Babetto, Kniebel, and Stumpf
2022). With no wings and generally having four or more propellers
to generate thrust, multicopters allow for simple flight mechanics and
superior flight control (Hoffmann et al. 2007). The
Helicopter configuration is often excluded in UAM research due
to its non-electric power and high noise emission. However, with the
development of technologies, the helicopter configuration could be
improved and should be considered in the research. Other UAM concepts
are unconventional configurations, such as tail-sitters among others,
but are not further detailed in this study. A comparison of the various
eVTOL configurations with respect to each model’s capabilities in terms
of range, speed, payload capacity, efficiency, affordability, etc.
contributes to mapping the explored design space onto existing mission
and operation requirements and thus, to down-select promising candidates
resp. identify suitable configurations for a specific mission.
Comparative studies of UAM configurations fall into two main categories:
analyses based on statistical data taken from eVTOL projects beyond the
concept phase, and analyses based on the design and simulation of
conceptual models.
Figure 3: General conceptual layouts for candidate
configurations ((Babetto
and Stumpf 2021)).
2.1.1 Statistical and conceptual
model analysis
Statistical analyses
Several statistical studies have listed the UAM concepts that have
emerged on the market (e.g. (Polaczyk et al. 2019), (Goyal et al. 2018),
(McDonald and German
2017), (Marzouk
2022), (Datta et
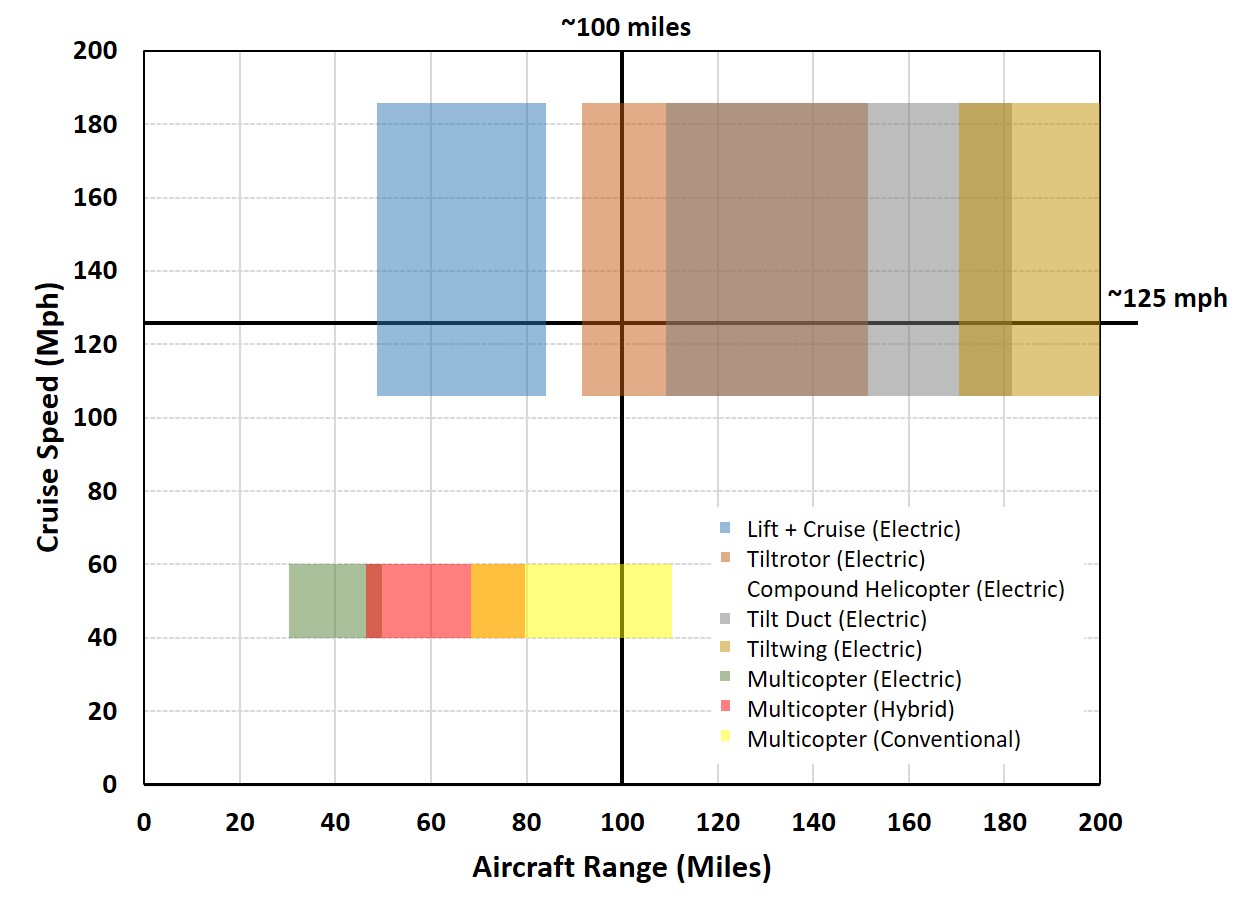
al. 2018)). It can be seen that the cruise speed of the
multicopter configurations ranges from 64-97 km/h. This is generally
slower than the typical 177-306 km/h of the winged configurations.
Multicopters using conventional fuel have a greater range than those
supplied by hybrid-electric power. Purely electrically driven
multicopters with 48-80 km have the lowest range of all analyzed eVTOL
options. In comparison, the purely electrically driven Lift + Cruise
configuration can cover ranges within 80-128 km. Figure 4
schematizes these statistical considerations on eVTOL performance. In
addition to speed and range, two principal metrics of eVTOL performance
are also typically included in statistical analyses of eVTOL concepts
((Datta et al.
2018)):
Power loading, i.e., the mass of the aircraft lifted per unit of
power while hovering,
Aircraft lift-to-drag ratio during cruise.
Low-speed hover-dominant vehicles are designed to operate at low disc
loading to achieve high power loading, but cruise-dominant/high-speed
vehicles are designed to operate at higher disc loading to provide a
superior lift-to-drag ratio. Therefore, a trade-off analysis between the
hover and the cruise performance must be carried out based on the
required mission ((Sun et al.
2021)). Overall, the statistical considerations draw the same
conclusions regardless of the metrics considered, i.e., cruise vs. range
or power loading vs. lift-to-drag ratio.
Figure 4: VTOL vehicle range versus cruise speed graph
((Goyal et al.
2018)).
Analyses through conceptual models
A conceptual design analysis requires the creation of a conceptual
design method. Since the conceptual design methods rely on a limited
design space of eVTOLs, these studies include sensitivity analyses in
order to draw conclusions on the whole design space of UAV design.
Several conceptual design analyses are performed, e.g., (Kraenzler,
Schmitt, and Stumpf 2019; Kadhiresan and Duffy 2019; Bacchini and
Cestino 2019). These works analyzed the performance of
multicopter, tilting configurations, and Lift + Cruise to evaluate the
efficiency of eVTOL configurations with respect to range variation. With
regard to energy efficiency (i.e., using payload-specific energy
metrics) of vehicles with the same size and mission profile, Kraenzler
concluded that the tilt-wing layout can achieve a range of 95 km;
whereas, the multicopter configuration is ideal for a shorter range of
up to 18-20 km. The Lift + Cruise configuration performance is a
compromise between the advantages of tilting configurations and
multicopters with acceptable flight endurance and payload capacity.
Similar to (Kraenzler,
Schmitt, and Stumpf 2019), (Kadhiresan and Duffy 2019) analyzed
the performance of eVTOL configurations with constrained sizes and
different battery energy densities in order to select the optimum
configuration with minimum feasible gross weight for identical payload.
If assuming a high battery energy density (300 Wh/kg), the multicopter
is suitable for low speeds (80-160 km/h) and short ranges (16-64 km),
whereas the other considered configurations are suitable for high speeds
(up to 240 km/h), respectively, the tilt-wing and Lift + Cruise
configurations being most suitable for long range missions (up to
160 km).
The conclusion of the work in (Bacchini and Cestino 2019) is that
multirotors enable lower energy consumption in hovering condition,
tilting configurations are more efficient at high cruise speed with the
range depending on the specific mission profile and Lift + Cruise
configurations are a compromise between the two mentioned concepts.
Overall, although the conditions of the simulations in (Kadhiresan and
Duffy 2019; Kraenzler, Schmitt, and Stumpf 2019; Bacchini and Cestino
2019) are study-tailored, the drawn conclusions agree well (Garrow, German, and Leonard 2021;
Bauranov and Rakas 2021; Mitchell et al. 2022; A. P. Cohen, Shaheen, and
Farrar 2021).
2.1.2 General VTOL design
principles
In summary, by combining the statistical with the conceptual model
analyses, the following design principles can be summarized:
The Lift + Cruise configuration is a compromise of wingless
rotorcraft and fixed-wing aircraft. However, as the lift rotor is not
used during cruise, this adds extra weight and, thus, drag. In turn, the
wings and pusher propellers add weight, which is detrimental during VTOL
and hovering stages, i.e., increasing disk loading and reducing hovering
efficiency. Hence, the Lift + Cruise configuration could be an optimal
choice at medium speeds and ranges but it might not be the best choice
for the combination of small ranges and low speeds or large ranges and
high speeds.
The vectored thrust configuration is preferred for long ranges
and high speeds due to its high lift-to-drag ratio. And a distributed
propulsion system can further improve its cruising efficiency. The
disadvantage of vectored thrust configurations is that the mechanism
used to vector the thrust increases the weight of the propulsion unit
and increases the complexity of the aircraft system and structure, thus,
reducing reliability resp. increasing maintenance efforts. The tilt-wing
configuration is generally heavier than a tilt-rotor configuration
because of the complex tilting system of the wing. However, in some
cases, tilt-rotor’s rotor slipstream is negatively affected by the wing
compared to the tilt-wing configuration.
The multirotor configuration is limited to short ranges and low
speeds due to relatively low disk loading and low lift-to-drag ratio
during cruise. Helicopters can fly faster than multicopters due to their
cyclic rotor system. However, because of the increased complexity of the
rotor system and higher speeds, helicopters are less efficient than
multicopters on very short ranges.
2.2 UAM Operation Analysis
In order to compare different UAM services based on diverse eVTOL
configurations and missions, analyses regarding the cost-effectiveness
of diverse UAM services are required (Mitchell et al. 2022; A. P. Cohen, Shaheen, and
Farrar 2021; Ahmed et al. 2023). Here, a potential UAM service
can be considered in two levels, namely the vehicle level and the fleet
level ((Garrow, German, and
Leonard 2021)).
2.2.1 Vehicle level: performance
analysis
For the UAM vehicle level, state-of-the-art vehicle parameters are
applied to an equivalent base-case mission profile, and performance
analyses are conducted. Hence, the mission profile has to be defined in
the first place to derive power requirements, range restrictions, flight
efficiency, and energy costs as part of the total operating costs. The
energy consumption per flight itself is dependent on the vehicle’s
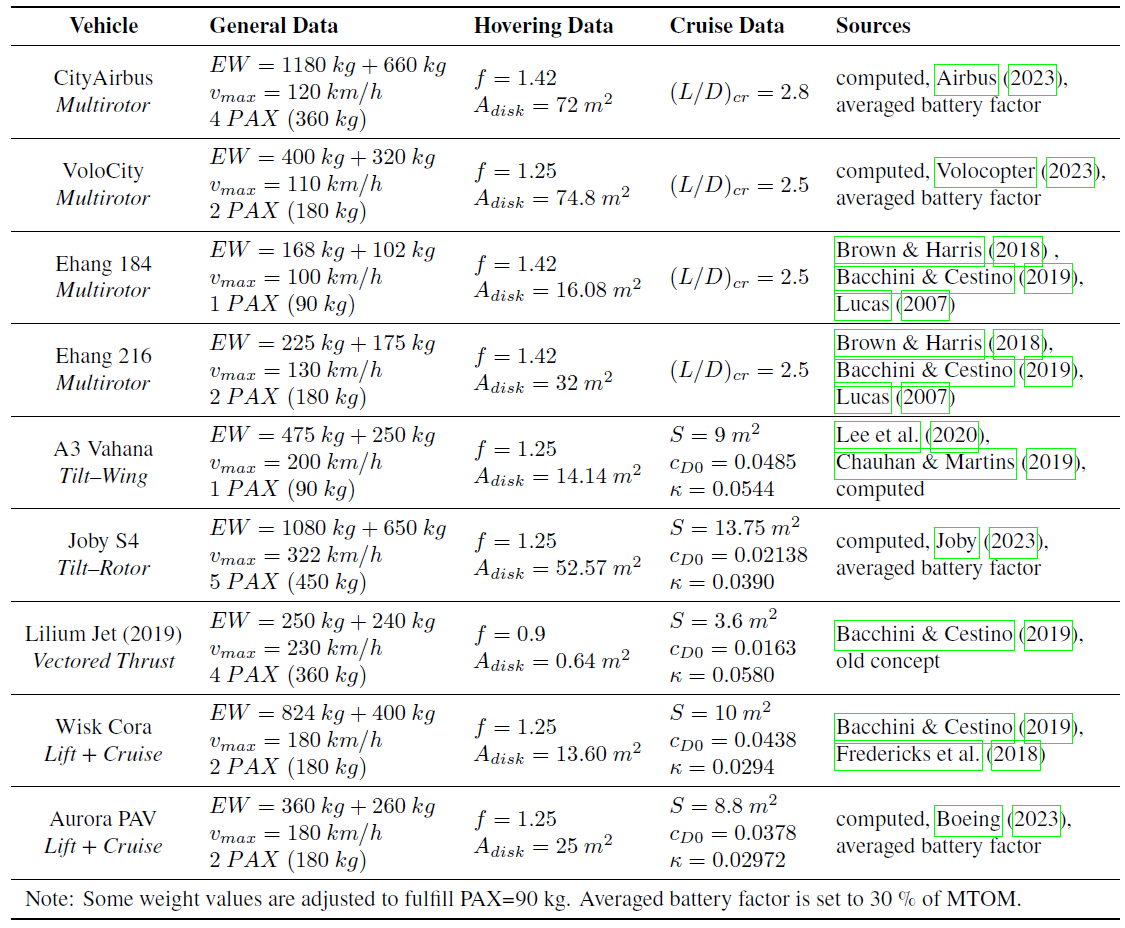
performance data and the mission profile (see Table 1). To calculate the required power
for the mission, the mission flight segments have to be defined ((Melo et al. 2020)).
Referring to (Lee, Tullu,
and Hwang 2020) and (Kasliwal et al. 2019), three flight
segments are considered:
a hovering phase for takeoff,
a horizontal flight segment for the cruise,
a hovering phase for landing.
Transition phases depend on the vehicle configurations and on the
respective legal basis, and, thus, are considered uniformly at this
point. The required hovering power Phover
for an eVTOL vehicle is derived from the disc actuator theory with
correction factors based on the configuration, such as coaxial or single
rotors (Fredericks et al.
2018; Husemann, Kirste, and Stumpf 2023; Lucas 2007). For
horizontal cruise, the required power is dependent on the vehicle’s
gross weight, lift-to-drag ratio, cruise flight efficiency and cruise
speed (Melo et
al. 2020; Husemann, Kirste, and Stumpf 2023). The eVTOL data are
summarized in Table 1 with reference to (Brown and
Harris 2018; Bacchini and Cestino 2019; Chauhan and Martins 2019; Lee,
Tullu, and Hwang 2020). Additional computed data through OpenVSP
simulation for aerodynamic parameters, e.g., cD0 and k = (1)/(p e L), are
included. Furthermore, a hovering time phase of 60 seconds per each
takeoff and landing phase is set, a medium battery-specific energy
density of 250 Wh/kg is assumed (Brown and Harris 2018; Lückhof
2021), a cruise flight efficiency of 75 % is considered (Kasliwal et al.
2019; Melo et al. 2020) and maximum battery usage of 80 % is
included (Kasliwal et
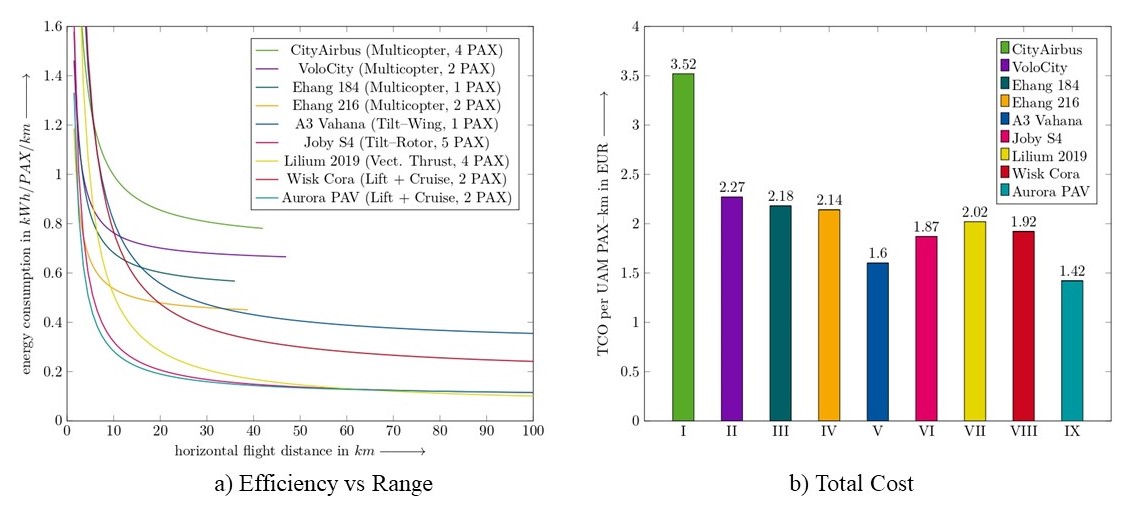
al. 2019). Based on these data, a diagram illustrating the trend
of efficiency vs range is displayed in Figure 5 a) for the
considered eVTOL configurations. Results show that multirotor
configurations require more energy per payload-km and have a shorter
range. Nevertheless, considering UAM trips of 15–20 km, multirotor and
other configurations overlap regarding performance. Therefore, aspects
at the fleet level must be investigated for a holistic analysis.
Vehicle specifications and data for analyses.
2.2.2 Cost analysis at fleet
level
Referring to (Garrow,
German, and Leonard 2021; Mitchell et al. 2022; A. P. Cohen, Shaheen,
and Farrar 2021; Ahmed et al. 2023), fleet-level analyses provide
additional metrics to comprehensively compare UAM services without
relying solely on vehicle performance facilitating decision-making on
infrastructure planning and economic viability. In order to perform a
fleet-level analysis, supplementary input data are required. As a part
of a fleet-level analysis, this study focuses on a cost analysis
considering recharging requirements of the vehicles, demand fluctuations
of UAM trips during an operating day, capacity constraints at
vertiports, and optimization potentials regarding network sizing and
infrastructure planning (Garrow,
German, and Leonard 2021; Ahmed et al. 2023). For cost
calculation, an approach by (Husemann, Kirste, and Stumpf 2023) is
used. Here, the authors combine a Multi-Agent Transport
Simulation of UAM flights as input data with a mathematical cost
optimization model. The emphasis is on the scenario of the Metropolitan
Region Ruhr as requested UAM trips are mainly in the range of 15 to 20
kilometers (Anna Straubinger et
al. 2020; Sun et al. 2021). In particular, the cost optimization
model includes costs for infrastructure and recharging, costs for the
vehicle fleet and related maintenance, costs for batteries, and energy
costs as suggested in (Garrow,
German, and Leonard 2021; Mitchell et al. 2022). As typical input
data, 33 0 days of UAM operations per year are assumed as average,
energy costs are set to 0.22 EUR/kWh, a residual value of 30 % of the
vehicles after 13 years lifetime is presumed and the vehicle costs are
calculated in relation to the empty weight with a factor of 675 EUR/kg
((Husemann, Kirste, and
Stumpf 2023)).
Minimizing the total cost of ownership (TCO) of one day of UAM
operations, the results can be calculated with respect to the different
eVTOL configurations. Results show the average costs are around 2 € per
payload vs trip-kilometre with an overall market share of up to 1 % of
all mobility trips which is in line with recent literature (see (Husemann,
Kirste, and Stumpf 2023; R. Rothfeld et al. 2021; Garrow, German, and
Leonard 2021; Ahmed et al. 2023; Mitchell et al. 2022).
Considering the parameter studies by (Kirste, Husemann, and Stumpf 2022) and
(Husemann, Kirste, and
Stumpf 2023), the following considerations can be highlighted.
For multirotor concepts, the operation of a UAM fleet is inefficient and
only economically valuable with a battery-specific energy density of
250 Wh/kg and above. This can be explained by the cost per
payload–kilometer since multirotor concepts spend more time on the
ground. Moreover, recharging requirements for multirotor concepts are
higher, which leads to a worse fulfillment of demand especially at rush
hour times, and further increases costs for charging infrastructure. The
total cost per UAM flight (payload-kilometer) is higher than for Lift +
Cruise or tilt-rotor concepts due to more restrictive recharging
constraints at the fleet level and demand cuts resulting from the
shorter range. Moreover, for the Lift + Cruise or tilting concepts, a
high cruise speed above the optimal lift-to-drag ratio can be considered
inferior, as the additional demand due to the reduced travel time cannot
compensate for the increased energy consumption and the resulting
battery as well as recharging constraints. For these concepts, a
hovering time of less than 150 sec is critical to implement fleet
operation economically valuable with current battery technology.
Besides, the advantages of high payload capacity vehicles can be
assessed as detrimental at the fleet level. This is due to higher
waiting times when the vehicle operates at full capacity (as this leads
to a reduction in the total number of requests) and higher energy costs
when the vehicle operates when it is not fully loaded.
A scheduled dispatching approach can be considered an alternative to
an on-demand air vehicle service. This is due to the higher operational
variability of on-demand systems and the resulting noise emissions,
which cannot be precisely controlled as in the case of scheduled
approaches. The acceptance of higher demand by users of an on-demand
system is thus contrasted with lower acceptance by non-users.
Furthermore, it should be noted that technical calculations and cost
estimation depend on the legal framework of UAM operation and on user
acceptance. Therefore, the lower costs for autonomous vehicles assumed
here could be limited as piloted aircraft are currently more accepted
than autonomous vehicles. The further development of technical concepts,
based on the legal framework that lays behind allowable operations, has
to be considered at the overall system level as significant to specify
viable future scenarios.
Figure 5: Efficiency vs range (a) and total costs (b) for different
eVTOL vehicle fleet operations.
3 Legal aspects of the UAM
system
The emergence of UAM has attracted attention since the mid-2010s
(Organization for
International Economic Relations 2020; Garrow, German, and Leonard 2021;
Anna Straubinger et al. 2020; A. P. Cohen, Shaheen, and Farrar 2021;
Berger 2022). For this reason, numerous initiatives and
regulatory frameworks have been put in place in recent years to ensure
the safe integration of novel types of aerial vehicles into the
urban environment in compliance with current and future regulations
(Keller, Hulínská, and
J. 2021; Bauranov and Rakas 2021). In the following part, the
regulatory steps from 2017 to 2022 are methodically enumerated with the
aim of delineating the European regulatory process and highlighting the
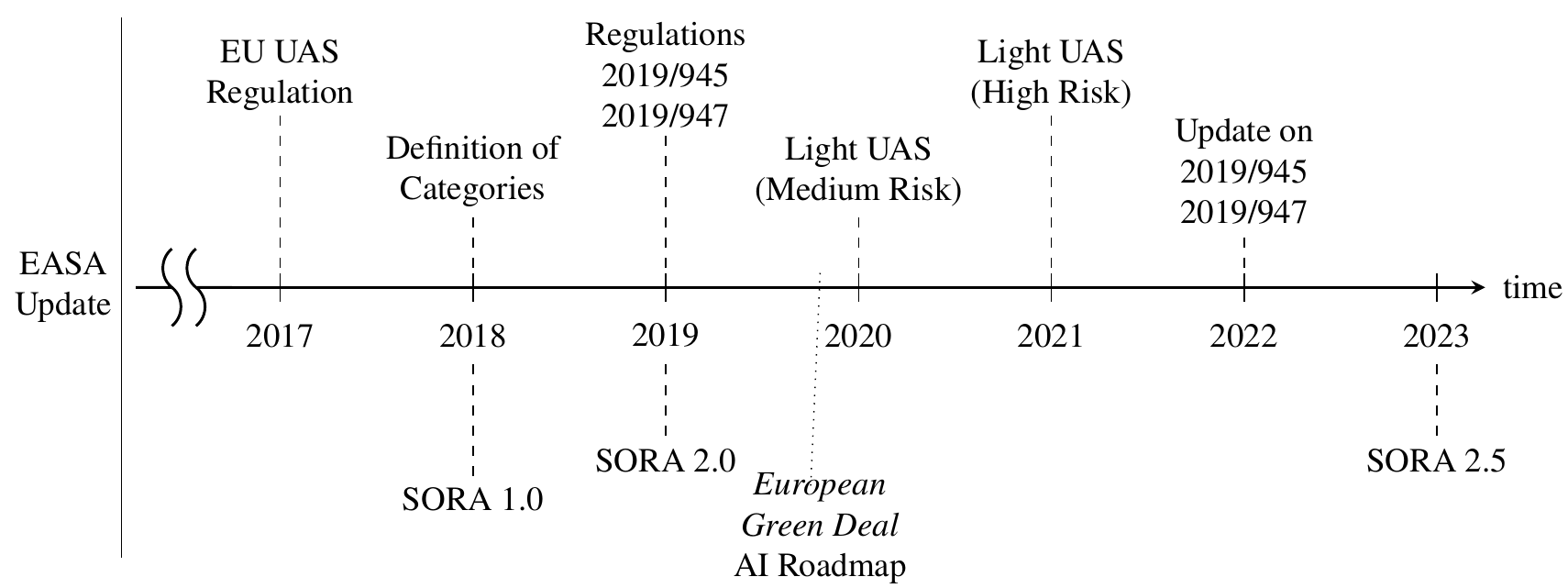
impact of stakeholders and the public on it. Figure 6 depicts the principal milestones
achieved in Europe.
Figure 6: Timeline of important EASA certification
publications.
3.1 European UAM regulation in
2017-2022
In Europe, the European Union (EU) and the European Union Aviation
Safety Agency (EASA) are the institutions responsible for regulating UAM
and issuing the necessary UAM certification standards.
Before 2017 - The first release of UAV regulations was at
the end of 2016 (EASA 2017). These regulations were
guided, especially in the beginning, from the European certification
standards CS-23 for small aircraft and the CS-27 for small rotorcraft.
Purely implementing the certification standards for either small
aircraft or rotorcraft, based on the type of vehicle, and incorporating
minor modifications would not ensure an equitable certification
procedure.
Nevertheless, the first set of conditions for the certifications of
UAVs was based on the aeronautical standards as they were the only
certification specifications available: the result was a "prototypical"
set of conditions for the certification, applicable in specific
circumstances and contexts (Nikodem, Dittrich, and Bierig 2018; Anna
Straubinger et al. 2020).
2017 - To address the lack identified prior to 2017, the
EASA took proactive measures by implementing a harmonized regulatory
framework for UAM in Europe (see Figure 6). This
marked EASA’s initial step towards ensuring a common regulatory
framework for UAM in Europe. To differentiate aerial vehicles based on
weight, speed, size, and the level of risk they pose in the air and on
the ground, a categorization of future UAM vehicles into three classes
was essential to improving safety, establishing clear regulations,
simplifying the certification process, and stimulating innovation in the
UAM industry. Furthermore, in order to update and extend the regulatory
framework for the certification of UAM vehicles, EASA launched an
initiative inviting stakeholders such as industry, academia, and
national authorities involved in UAM to collaborate in the development
and adoption of UAM by providing feedback on UAV regulations. Public
concerns were also collected. The involvement of stakeholders and the
public can help ensure that regulatory decisions are based on a thorough
understanding of the challenges posed by UAM, while also addressing the
needs and concerns of all parties involved (Mitchell et al. 2022).
2018 - Although there were no rulemaking developments, i.e.,
no new policy release, the definition of the categories was
finalized in the document "Introduction of a regulatory
framework for the operation of unmanned aircraft systems in the ’Open’,
’Specific’ and ’Certified’ categories which was an important cornerstone
in the regulatory process (see Figure 6. EASA’s
commitment to working with stakeholders and the public was successfully
demonstrated being a necessary approach for the safe integration of UAM
into the airspace.
2019 - In 2019, several important milestones were achieved
in the regulatory activity for UAM. The first concrete milestone for the
regulation was done as a first step towards implementing a comprehensive
framework for UAS operations across Europe. Remarkably, the "Commission
Delegated Regulation (EU) 2019/945 on unmanned aircraft systems" and the
"Commission Implementing Rules 2019/947" were published (see Figure 6). There are a number of risk factors
that must be taken into account when deploying UAVs, including
challenges related to airspace management, safety protocols, public
acceptance, and regulatory compliance with manned air traffic ((Organization for
International Economic Relations 2020; Bauranov and Rakas 2021; Sells
2022; Ahmed et al. 2023)). EASA’s three categories of UAVs are
based on their weight, size, and intended operation ((Schuh et al. 2022)). The
combination of weight, size, and operation leads to the level of risk.
This level of risk is qualitatively calculated through the Specific
Operation Risk Assessment (SORA) approach ((Nikodem, Dittrich, and Bierig
2018; Babetto, Kniebel, and Stumpf 2022)). The development of a
risk-based approach SORA was an important milestone, as it considers not
only the safety level of the aerial vehicle per se but also the risk
posed to the surrounding environment in which it operates ((Schuh et al. 2022),
(Babetto, Kniebel, and
Stumpf 2022) and (Berger 2022)).
The involvement of aviation in the Green Deal initiative further
highlights the significance of UAM in promoting sustainability and
addressing environmental concerns ((European
Commission and EASA 2019; Pons-Prats, Živojinović, and Kuljanin 2022;
Organization for International Economic Relations 2020; Ahmed et al.
2023)). The goal is to develop new sustainable solutions
for transportation, including the innovation represented by the UAM
scenario by providing a low-emission mode of transportation with eVTOLs,
which can contribute to the transition towards more low-carbon aviation.
The concept of Standard Scenario (STS) is also introduced in both
Regulations 2019/945 and 2019/947. The STSs are collections of
operational and technical requirements for UAV operations that are
deemed low-risk and can be carried out without the need for a specific
operational authorization are defined. An extension of STSs is planned
to be published soon, defining the ability to handle greater MTOMs, the
flight above densely-populated areas along with the BVLOS, and automated
flight mode as intended in (EASA 2022). In fact, the wider the
scope of STSs is, the more straightforward it is to certify and conduct
UAV operations ((Bauranov and
Rakas 2021; Anna Straubinger et al. 2020; Mitchell et al. 2022)).
Hence, the evolving definition of the STSs, along with the
categorization of UAVs, has been recognized as a step forward for the
successful and flawless market entry of UAM vehicles ((Anna Straubinger et al.
2020)).
2020 – In 2020, the EASA released the first version of the
Artificial Intelligence (AI) Roadmap 1.0, (see (EASA 2020a)). The ethical dimension of
the AI application in aviation is discussed targeting the challenges
presented in the adoption of augmented systems and machine learning for
automatic decision-making ((Anna
Straubinger et al. 2020; Bauranov and Rakas 2021)). At the time
of release in 2020, there was no impact on rulemaking. Despite this, its
potential impact on UAM regulations in the future, which target
highly-automated systems, could be indirect by providing a framework and
new standards for the safe, secure, and effective use of AI in aviation
and, in turn, in the UAM system ((Sells 2022)). In addition, the EASA released the
first edition of the ”Special Condition for the Certification of UAVs ”,
which detailed specific safety requirements for UAM vehicles in the
“Specific” category (see (EASA 2020b)). For instance, performance
(MTOM, maximum altitude, and airspeed, type of operation), control and
communication as well as navigation and surveillance (e.g., requirements
for the detect-and-avoid system) along with environmental and noise
emissions levels are covered as fundamental aspects for UAM operations
as outlined by (Bauranov and
Rakas 2021; Sells 2022; Mitchell et al. 2022).
This calls for an airspace concept specifically designed for the
deployment of UAM vehicles, namely the U-Space, which includes
establishing air traffic management and, communication and surveillance
requirements ((Anna Straubinger
et al. 2020; Bauranov and Rakas 2021)).
2021 - A revision of the ”Special Condition for the
Certification of UAVs ” was issued extending the coverage of riskier UAM
vehicles (see Figure 6). Moreover, the first proposal for
the U-Space was made available. Here, a ”high-level framework” was
discussed capable of integrating the unmanned traffic into the manned
traffic in a harmonized way. The definition of U-Space, such as
providers’ as well as services’ requirements along with responsibilities
allocation, interoperability and data exchanges protocols definition, is
a necessary aspect for ensuring the safe and efficient integration of
low-altitude flights over urban areas ((EASA 2021b; Bauranov and Rakas 2021; Mitchell
et al. 2022; Sells 2022)). Hence, its establishment in 2021
represents one more essential milestone in the development of a robust
regulatory framework for the UAM system in Europe ((Anna Straubinger et al.
2020)).
2022 - In 2022, the norm already laid down was regularly
updated in terms of safety management and risk containment, national
certification and border-related inconsistencies in legal policy.
Besides, the noise emissions were also covered ((European Union and EASA 2022; Anna
Straubinger et al. 2020; Bauranov and Rakas 2021)). Lastly, in
September 2022, a revision of the Regulation 2019 was released and can
be read in (EASA
2022) (see Figure 6). Inviting
the national authorities to conform with the European regulations in
terms of UAM vehicles’ requirements and certification as well as
U-Space-related policies represents a further fundamental step towards a
harmonized U-Space framework across Europe ((Sells 2022; Ahmed et al. 2023)).
In summary, EASA has adopted a robust approach to addressing
necessary aspects of the regulatory framework for UAM since 2017. Today,
this framework includes technical design through the class definition,
manufacturing, safety levels, and safe operations via the formalization
of SORA and, airspace harmonization with ATM by establishing the
U-Space. Furthermore, stakeholder and public cooperation have been
launched and developed over time, resulting in successful rulemaking
acceleration. Through stakeholder involvement, the regulatory technical
gaps have been addressed systematically, and public concerns have been
targeted to increase acceptance, which has a great impact on the
adoption of innovative technologies as detailed in Section 4.
3.2 Legal challenges
identification
Considering the actual legal framework presented in Section 3 and similar worldwide studies (e.g.,
(Sells 2022; Bauranov and Rakas
2021)), various challenges have been identified that the UAM has
to face to be fully integrated into the airspace and are summarized
here:
The flight in BVLOS is essential for many UAM use cases (e.g.
delivery, passenger transportation, and aerial inspection). However,
this is currently allowed only if a human ground operator has visual
contact with the aerial vehicle and can communicate with the pilot in
real-time.
The flight above densely populated (or congested) areas is not
permitted.
The airspace and correlated traffic controller providers are
still vague: for instance, the UAM system might take place either in the
uncontrolled airspace, in the controlled airspace or in a merged
airspace of the previous two.
The UAM system is expected to be highly autonomous but today only
flights monitored by a licensed operator are authorized. This is
accompanied by the use of advanced AI algorithms, which in turn raise
cyber-security challenges.
UAM vehicles must be designed considering the minimization of
noise emissions as a design driver.
Privacy and data protection concerns must be tackled, as there is
no common protocol available that complies with the data protection
standard.
Overall, the lack of regulations and protocols, service providers,
and a transparent harmonization with general aviation as well as strict
airworthiness requirements impede any operation carried out in a city.
This inevitably compromises the deployment of the UAM system. These
challenges, which compromise public acceptance, will be tackled to
derive new design drivers to accelerate the safe adoption of the UAM
system.
4 Social aspects of the UAM
system
Establishing UAM as a future transport option requires on top of
technological maturity and a legal framework acceptance by the affected
stakeholders, in particular the acceptance of society. Although it is a
highly relevant scientific topic to study the acceptance for
successfully adopting and establishing new technologies, the UAM
acceptance has not yet been fully grasped (Johnson, Miller, and Conrad 2022;
Tepylo, Straubinger, and Laliberte 2023). The purpose of the
following literature review is to investigate the factors that encourage
or discourage individuals to try UAM and, thus consequently, not only to
tolerate it but to accept the new mobility option to enter the market
(Al Haddad et al.
2020). UAM, including UAVs, UTM, and the legal framework, is not
yet in place resp. in service. As a result, the only way to study
acceptance is to assume that behavioral intention and/or willingness to
try UAM services corresponds to acceptance per se (Ajzen 1991; Garrow, German, and
Leonard 2021; Lotz et al. 2023). This motivates the dynamics and
changeability of UAM acceptance. Moreover, although statistical analysis
with a large sample size is a valuable tool for identifying overall
trends and patterns in UAM acceptance, it cannot fully capture the
individual experiences and perspectives within the population (Johnson, Miller, and Conrad
2022). Thus, individual opinions are important for comprehending
the reasons behind specific statistical trends, identifying potential
issues, and developing more "accepted" solutions. Individual opinions
play also a significant role in shaping the dynamics and changeability
of UAM acceptance, as they may adapt over time in response to changing
circumstances, evolving information, or altering social and cultural
contexts. Despite this complex interdependence, previous UAM research
has been able to assess acceptance and analyze the relevant factors
influencing it ((Tepylo,
Straubinger, and Laliberte 2023)).
4.1 Factors for the social
acceptance study
The acceptance concerning UAM can be derived by analyzing the studies
of UAM acceptance in light of three groups of influencing factors for
primary conventional acceptance: subject-related, object-related, and
context-related factors. Subject-related factors refer to the
characteristics of the individuals who consider UAM as a mode of
transportation, whereas object-related factors consist of the individual
evaluation of the technology (i.e., the object) in a specific
environment. Instead, context-related factors address the conditions
under which the individuals (subjects) accept the new technology
(object) (Tepylo, Straubinger, and Laliberte
2023; Schäfer and Keppler 2013).
The psychological, sociological, and demographic characteristics of
people who might use or interact with UAM are referred to as
subject-related factors. For instance, younger people are more
likely to use UAM services and are generally more receptive to new
technologies. The importance of gender and income was also noted, as
women and those people with lower incomes are less inclined to use UAM
due to cost and safety concerns ((Yedavalli and Mooberry 2019)). In
addition, previous exposure to similar modes of transportation, such as
private planes or helicopters, may influence how individuals perceive
UAM. Based on the study area of Germany, (Dannenberger et al. 2020; Fu,
Rothfeld, and Antoniou 2019) found that age and gender are the
main factors influencing the acceptance of air vehicle systems for
passenger and freight mobility. Younger and male respondents are more
likely to accept UAM vehicle systems. The influence of respondent’s age
on acceptance is confirmed by (Castle et al. 2017) and (Bansal, Kockelmann, and Singh
2016). Instead, the research of (Al Haddad et al. 2020) and (A. Straubinger et al.
2020) focused on sociological aspects, showing how employment
status, commuting factors, culture and/or education can influence a
person’s choice of transport mode. People with higher levels of
education and people that hold a driver’s license are more interested in
utilizing UAM services (in (A. Cohen, Shaheen, and Farrar 2021) and
(Krueger, Rashidi, and
Rose 2016) respectively, accompanied by the work of (Fu, Rothfeld, and Antoniou
2019)). Moreover, (Shaheen, Cohen, and Farrar 2018), (Dannenberger et al.
2020) and (Johnson, Miller, and Conrad 2022) found
that familiarity with and accessibility to technology related to UAM had
a positive influence on people’s perceptions of the UAM vision. In
particular, (Dannenberger et al. 2020)’s study
showed that men were more attracted due to technological accessibility,
although the impact of this factor was significantly lower compared to
the other (purely demographic) factors. Lastly, individual perception is
strongly subjective, i.e., a person’s personality may have an effect. An
open mind and an individual propensity for innovation, according to
studies such as (Charness et al. 2018) and (Al Haddad et al.
2020) respectively, increase acceptance of UAM.
The object-related factors refer to the characteristics of
UAM that may affect public acceptance of this mode of transportation.
Safety (and reliability) is often cited as the most important factor, as
accidents or incidents involving UAM vehicles could have a significant
negative impact on public perception. Public acceptance of UAM can also
be influenced by other important components such as noise levels and
environmental impact. Furthermore, the public should also consider the
availability, price and privacy of UAM as object-related factors.
Firstly, it can be stated that a low environmental impact exerts an
important influence compared to competing mobility concepts. (Lotz et al. 2023) showed
that, in addition to price, environmental impact is a decisive factor in
motivating a switch to another mode of transport. Moreover, the choice
of transport mode is mainly determined by cost and travel time ((R. Rothfeld et al.
2021), (Al
Haddad et al. 2020), (Lotz et al. 2023)). In this case,
consumers are more likely to pay more for personal air travel than for
conventional ground transport, especially if the distance traveled is
longer. The work of (Fagnant and Kockelman 2018) and (NASA 2018) also
acknowledge the relationship between price and travel time. While the
latter focuses on UAM and autonomous aircraft, the findings of (Krueger, Rashidi, and Rose
2016) and (Fagnant and Kockelman 2018) primarily
deal with ground transport and commuting. These studies conclude that
the higher cost of UAM travel may have a negative impact on acceptance;
this is confirmed by (Shaheen, Cohen, and Farrar 2018).
Piloted UAM aircraft continue to be preferred by the community compared
to remotely piloted and autonomous aerial vehicles, despite the
promising improvement of highly autonomous technologies studied by (NASA 2018; Johnson,
Miller, and Conrad 2022). If a pilot is on board and monitors the
autonomous flight of the vehicle, the perception is positively changed
((Shaheen, Cohen, and
Farrar 2018)). However, the relative emphasis on autonomy and
remote control in the underlying surveys might lead to different levels
of acceptance among different groups of respondents ((Lotz et al. 2023)).
Safety is another critical factor that could influence acceptance and
has therefore been analysed in recent studies ((Kellermann, Biehle, and Fischer
2020), (Lotz et al.
2023)). Safety affects not only the attitude towards the entry
into service but also the intention to use UAM ((Babetto, Kniebel, and Stumpf 2022),
(Reiche et al.
2018)). In this context, it is important to underline that safety
covers different aspects ((Dannenberger et al. 2020)): on the
one hand, safety is correlated with the perceived risk; on the other
hand, the correlation is with the actual risk. In regard to this, it is
not only necessary to refine the aerial concepts but also to start a
dissemination initiative within the community through experts, the media
and politics. One misconception is for instance that piloted vehicles
are perceived as safer in any case than autonomous vehicles. This
negative safety perception might be due to a lack of familiarity and/or
knowledge about autonomous flight ((Slovic, Fischhoff, and Lichtenstein
1982)). Such perception is not only observed by users but also by
uninvolved people, who identified safety as their main concern ((NASA
2018; Yedavalli and Mooberry 2019; Al Haddad et al. 2020)).
However, it should be pointed out that this concern may be alleviated
and confidence regained if regular UAM-certification is fully
established, i.e., the certification level must be similar to that of
the automotive field or aviation ((EASA 2021c)). Additionally, the survey by
EASA indicated that noise was the second most important concern and
environmental friendliness was the third most relevant ((EASA 2021c)). Firstly,
noise, together with visual annoyance, is seen as potentially damaging
to the quality of urban life. This could undermine the deployment of UAM
((Shaheen, Cohen, and
Farrar 2018), (EASA
2021a), (EASA
2021c)). Secondly, people are more favourable to using a
sustainable mode of transportation ((Dannenberger et al. 2020));
however, the concrete environmental impact of the UAM is still under
investigation ((Lotz et al.
2023)). Lastly, privacy and cyber-security concerns (e.g.,
private life and data protection) are also identified as potential
issues by, respectively, (NASA 2018) and (EASA 2021c).
The broader social, economic and cultural circumstances, in which UAM
will be utilized, are referred to as context-related factors.
Public acceptance of UAM is strongly influenced by urbanisation, the
accessibility of current transport options and the regulatory framework.
The acceptance of UAM is also influenced by the ability of general
public in considering technological progress and its impact on jobs and
the economy. Take-off and landing stations, also known as vertiports,
are an important aspect of the UAM scenario evaluation. Acceptance is
influenced by access to vertiports, as the time saved by travelling to
vertiports could be reduced. Therefore, in future UAM planning, direct
and/or seamless access to the vertiports could increase the propensity
to use aerial vehicles ((R. Rothfeld et al. 2018), (Fu, Rothfeld, and Antoniou
2019)). However, the optimal location for the vertiport is still
being researched, as it depends on the infrastructure and urban design
of the city, as well as operational planning and noise annoyance. In
order to determine the placement of the vertiports, further assessments
of the future demand for such UAM services need to be conducted. In
summary, the placement of the vertiports could be a significant
challenge for the implementation of UAM as it requires expertise in
various disciplines ((R. Rothfeld et al. 2018), (Goyal et al. 2018)).
Lastly, the regulatory framework has been identified as another
important context-related factor. For instance, individuals are more
willing to adopt UAM when flying altitude, noise, safety, and privacy
are regulated by law ((Dannenberger et al. 2020), (EASA 2021c)).
4.2 Social acceptance study
In order to contribute to the study of public acceptance in Europe
towards the adoption of UAM, at the Institute of Aerospace Systems a
novel survey was developed and carried out. The survey was designed to
contribute to a more comprehensive knowledge of public acceptance with
respect to UAM in Europe. In addition to data collected by EASA in (EASA 2021c), which
focused on European metropolises, this work targets European
medium-sized cities.
4.2.1 Type of the analysis
In this study, a conjoint model is used. In a conjoint analysis,
participants are presented with a series of hypothetical product or
service scenarios that differ in terms of their attributes, such as
price, quality, design, and features. The participants are asked to
evaluate or rank the product or scenario, and the results are analyzed
using statistical models to determine the relative importance of each
attribute. This study focuses on determining how respondents value
various technical and legal characteristics of the UAM system. By better
understanding respondents’ "preferences", UAM developers (i.e.
UAV operators and/or service providers who will offer the UAM
technology) will be able to meet people’s needs and fulfil their
requests. In order to identify these "preferences", the survey
is carried out by decomposing an aspect and/or item into its
characteristics or specifications. For instance, the potential of the
UAM scenario is decomposed into benefits and concerns that UAM can
bring, which in turn comprise a spectrum of elements. On the one hand,
benefits are related to the reduction of road traffic and faster and
more customised transport services (Anna Straubinger et al. 2020; Garrow, German, and
Leonard 2021; Ahmed et al. 2023). On the other hand, concerns
include cyber-security issues and aural pollution (Anna Straubinger et al. 2020; Bauranov and Rakas
2021). To determine people’s preferences, a variety of
combinations of these factors are tested and evaluated. In this way, it
is possible to conclude how much each aspect contributed positively
and/or negatively to the respondent’s opinion with respect to the
adoption of UAM.
4.2.2 Survey Structure
Topics and sections The questionnaire was developed
with a developer- and user-friendly interface, where data are updated in
real-time. Furthermore, the extraction of data in spreadsheets and the
direct processing of data in graphs and tables accompanied by the
corresponding shares is possible. The authors only process the data
collected and the questionnaire is anonymous to protect the privacy of
the respondents.
Questions structure The questionnaire contains
various types of question-wording and answering options.
Questions The questions are grouped into thematic sections and
are briefly stated as single or multiple-choice questions to convey the
purpose and facilitate understanding. Only at the end of the survey,
there is an optional free text question to gather spontaneous feedback
and/or insights. Answers All responses can be multiple or
single answers by selecting from a suggested list.
Sample size At the national and metropolitan levels,
results are already available in the literature (see Section 4.2.2). For this reason, the present
work focuses on the identified knowledge gap with respect to
medium-sized cities. A medium-sized city is defined as a city with
100,000 to 500,000 inhabitants. An ideal city benchmark of around
200,000 inhabitants is chosen for this study. The opinion of such a
large population can be represented by accurately considering a
proper sample size. When calculating the sample size to obtain
the most accurate picture of the population, the margin of
error and the confidence level are accounted for: the
standard margin of error is set at 95 %, while the confidence level is
set at 5 %. The definition of margin of error and
confidence level can be, e.g., found in (Qualtrics 2023; Yedavalli and
Mooberry 2019). Given the benchmark of 200,000 people, the
calculated result suggests that the ideal sample size is 370
respondents.
Sample type The sample was obtained by collecting a
random sample, where everyone has an equal likelihood of being selected.
The survey was shared on multiple types of social media in order to
target diverse age groups and types of people. In addition, a QR of the
survey was generated and distributed in paper form by hanging it on the
streets of the city rather than handing it directly to people. The
combination of ’paper form and online approach’ was preferred to the
traditional approach of email or phone calls. Although the latter
approach allows for faster data collection, it was considered more
time-consuming due to the preparatory work and implementation. Instead,
the strategy used requires a considerable amount of time to be devoted
to the dissemination activity, as the survey needs to be ”popped
up” regularly.
Target sample The target cities were selected using
the following systematic methodology to collect responses from people
living in similar European medium-sized cities.
Initially, nine European countries were selected: United Kingdom,
France, Germany, Spain, Italy, Belgium, Netherlands, Denmark, and
Portugal 1. Secondly, cities with a population
of approximately 200,000 were identified. The selection process was
guided by an essential factor: the accessibility of the authors to the
city. The possibility to physically access the city enables the
distribution of the survey in paper form in addition to the online
format. Although the selection of predetermined cities may lead to bias,
the number of responses collected through the different distribution
approaches (online and in paper form) balanced this out. This would not
have been possible without access to the city. Additionally, one city
per country was selected based on similarities within the technical
factors listed below:
Market value: Gross Domestic Product (GDP) in billions of € in
2019,
Airfield nearby (in a radius of 15-20 km)
Presence of a technical university,
Similar addressable market and services offered.
The cities and technical factors are summarised in Table [tab:Cities2].
In Table [tab:Cities2], the age group 20-39 is
reported as it is the largest individual group within the selected age
range 20-70. However, while the age share reported in Table [tab:Cities2] is based on the total
population, including people under 20 and over 70 years old, the age
groups " < 20" and " > 70" are not included in this survey.
For this reason, the age share data in Table [tab:Cities2]
should be adjusted when verifying the representability of the sample.
This adjustment leads to excluding the "youngest" and "oldest" people,
i.e., approx. 35 % of the population.
4.2.3 Study Results
The survey was first distributed in December 2022. At the time of
writing, 358 have been collected. Although the number of respondents
does not meet the calculated ideal sample size, it is sufficient to
delineate a preliminary trend regarding public acceptance of UAM in
European mid-sized cities.
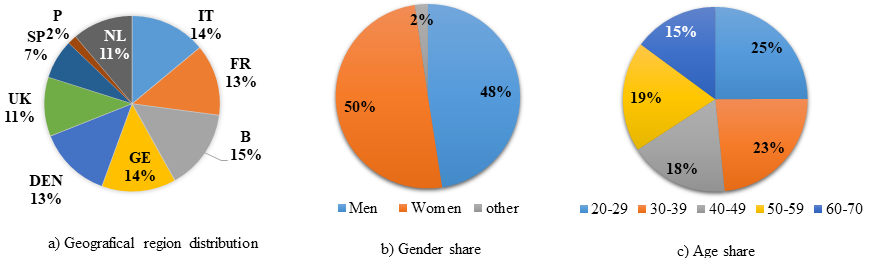
The geographical distribution of the sample is shown in Figure 7 a). South-western European countries
such as Spain and Portugal are currently being addressed, for this
reason, their share is at this point in time lower compared to the other
European countries and geographical uniformity has not been achieved
yet.
The sample includes 50.2 % of women and 47.5 % of men (see Figure 7 b), which corresponds to the gender
distribution of the selected cities summarized in Table [tab:Cities2]. A share of 97 % of the
respondents are between 20 and 70 years old. Seven respondents were
discarded as they were out of range. Figure 7 c) shows only
the age share within the 20-70 age group. Emphasizing the 20-39 age
group, it can be noted that the sum of the age groups, respectively
20-29 and 30-39, results in 48 % of the population. Comparing this
number with the “adjusted” and more consistent 38 % (derived excluding
the 35 % of the population as aforementioned with a preliminary
calculation), a gap of 10 % is shown, which is reasonable given the
potential statistical errors and the provisional correction used.
Figure 7: Distribution of the sample.
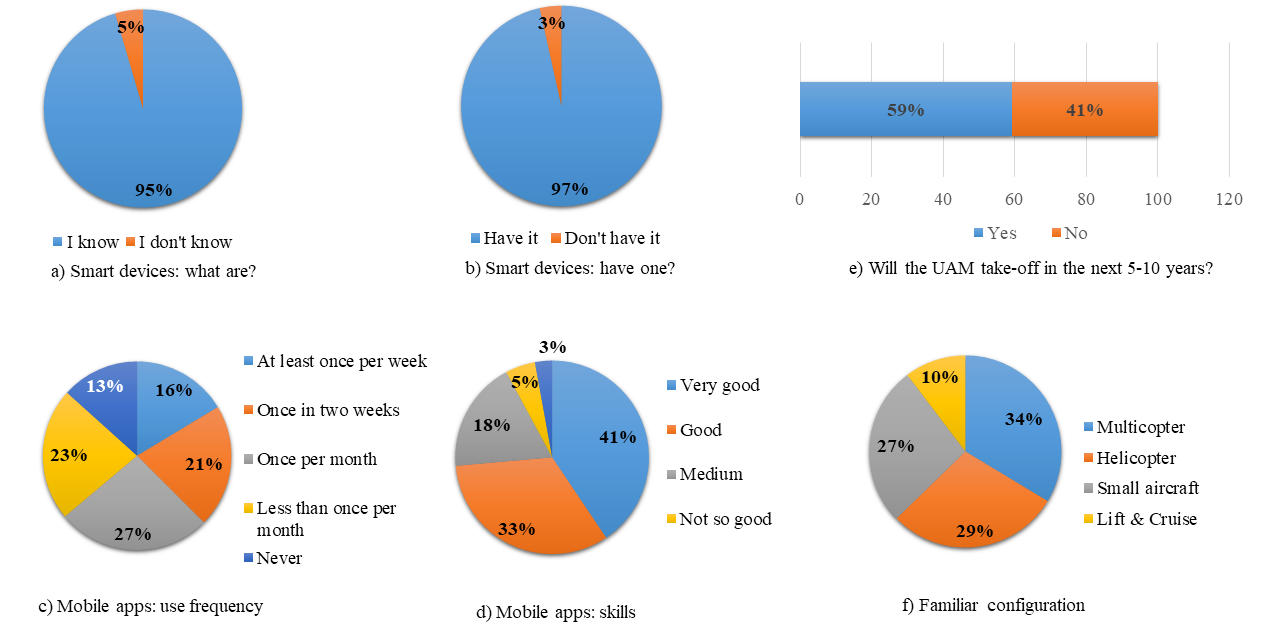
A share of 59 % of the respondents have a positive attitude towards
the future adoption of UAM as can be seen in Figure 8 e). In
particular, 95 % of the sample confirmed comprehending the term ”smart
device” and stated to own at least one ”smart device” (97 %) (see Figure
8 a) and b)). In addition, a relevant
number of respondents indicated that they often use mobile phone
applications for delivery services, booking, renting, ride-sharing,
etc., namely, 16 % specified “at least once per week”, 21 % “once in two
weeks”, 27 % “once per month”. The ability to use such services is
described by 41 % as “very good” and 33 % chose “good” (see Figure 8
c) and d)). This indicates a promisingly open-minded attitude towards
new technologies, which presumably justifies the share of favourable
willingness concerning the UAM scenario depicted in Figure 8
e).
Figure 8: Social abilities.
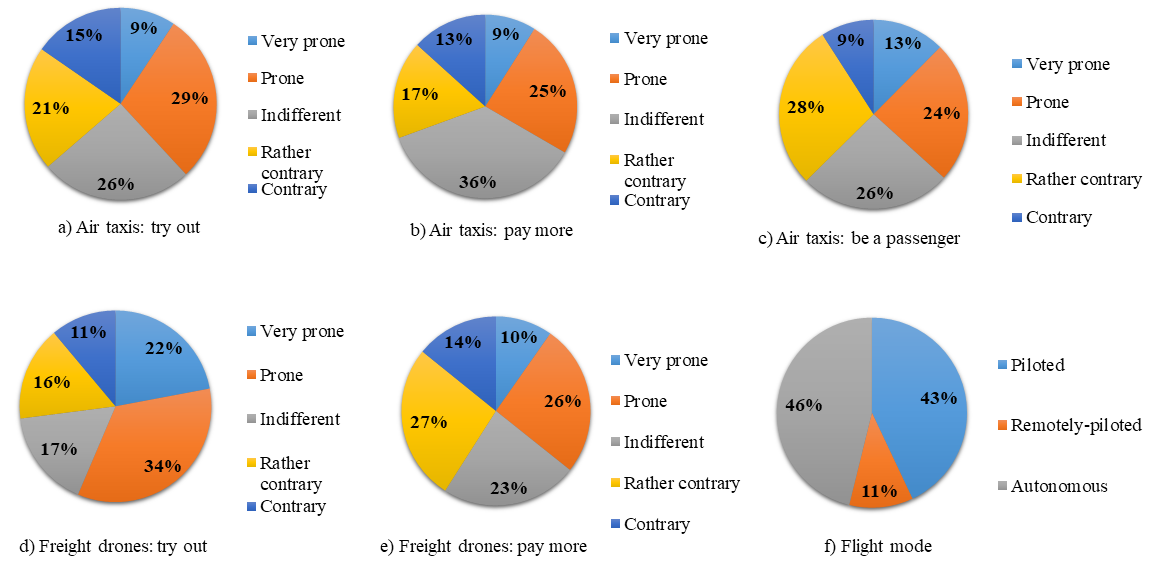
On the one hand, when asked to rank people’s opinions on trying
air taxis, 29 % of the respondents are prone and 26 % are
indifferent regardless of whether the price is higher than traditional
ground-based services. A share of 21 % of the replies shows the opposite
tendency. When requested the opinion on potentially higher airfares, 36
% of the respondents opted for the “indifferent” option, 25 % were
enthusiastic while 17 % were reluctant to pay more (see Figure 9 a) and b)). Furthermore, in the specific
use case of air taxis, the opinion on being a passenger has also been
investigated: 24 % of the respondents expressed comfort (13 % stated
high comfortability) and 26 % showed indifference. However, a share of
28 % would feel uncomfortable (see Figure 9 c)). The
majority of people who are indifferent to air taxis (36 % in Figure 9 b)) corresponds to the share of
respondents who expressed discomfort as being a passenger. This might
underline a lack of confidence in air taxis per se.
Figure 9: Willingness on UAM adoption.
On the other hand, with regard to drone delivery services, 34 % of
the respondents were enthusiastic about trying the service, 22 % were
very prone and 17 % expressed indifference. All this describes a
positive attitude towards drone delivery services (see Figure 9 c)). In addition, the opinion on paying
more for delivery services varies between enthusiastic and indifferent
(26 % and 23 %, respectively), while, 27 % expressed rejection (see
Figure 9 d)). This rejection, combined with a
similar response on accepting higher airfares, outlines a potential
concern related to the affordability of such UAM services. This
hypothesis is confirmed in the following section on UAM concerns.
Figure 10: Comfortability factors.
The subsequent section of the survey was meant to clarify how safety
is perceived. Respondents were asked which configuration they were most
familiar with among small aircraft, helicopters, multicopters, and a
combination of fixed-wing and wingless layouts (see Section 2). A share of 34 % of the respondents
placed the multicopter in the first place. The multicopter may be the
most familiar configuration, as this layout is already well-known for
operating close to people, e.g., leisure and filming drones, police and
inspection multicopter, and small package delivery vehicles. The
helicopter follows with 29 % of preferences. The lift + cruise is the
less familiar (10 %) (see Figure 8 f)).
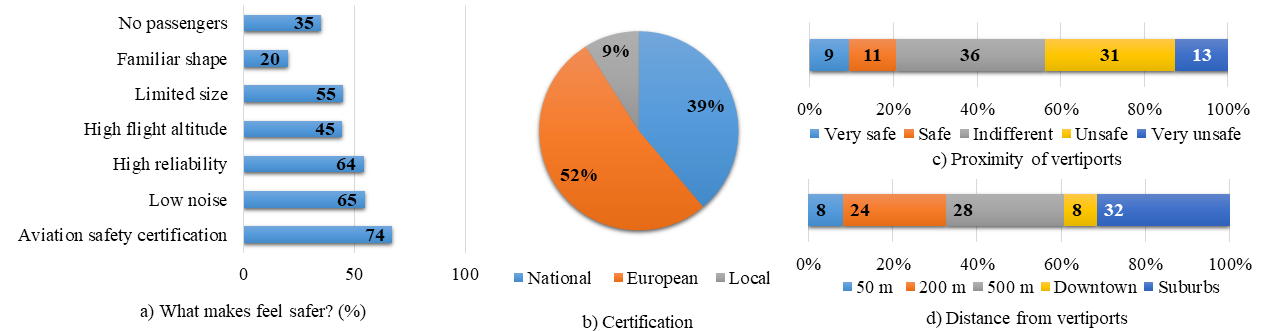
After focusing on safety in the previous section of the survey,
people were asked which aspect could ”make them feel safer”. This was a
multiple-choice question. The results show that 74 % of respondents
voted for certification at the aviation level, 65 % believed that low
noise levels improve comfort and 64 % thought that a reliable control
system induces a safer perception (see Figure 10 a)). In
particular, 52 % of the surveyed people preferred the European
authorities to grant permission to fly, while 39 % supported the
national authorities (see Figure 10b)). This high
level of national support is explained by the fact that the United
Kingdom has downgraded the role of the European Union in recent years:
in fact, a share approx. of 80 % of the English respondents supported
national authorities. Moreover, two English respondents selected the
preference of "local authorities" to grant the certification, which
strengthens in turn the national support.
The UAM infrastructure was also mentioned as a relevant factor for
UAM acceptance. The opinion on the acceptance of UAM can be improved by
investigating the urban planning and the location of the vertiports. As
Figure 10 c) shows, a share of 36 % of the
respondents is indifferent concerning the situation of such vehicles
taking off and landing in proximity to their residences. However, 31 %
are concerned and 13 % are very concerned. Although 11 % of respondents
ranked UAM vertiports generally as ”safe”, the tendency is towards a
negative attitude concerning the allocation of vertiports near
residential areas. Consequently, the questionnaire asked how far
vertiports should be located to increase comfort. A share of 28 % of
respondents stated that they would prefer vertiports to be located in
suburban areas or at least 500 m from their place of residence (32 % and
28 % respectively) (see Figure 10 d)).
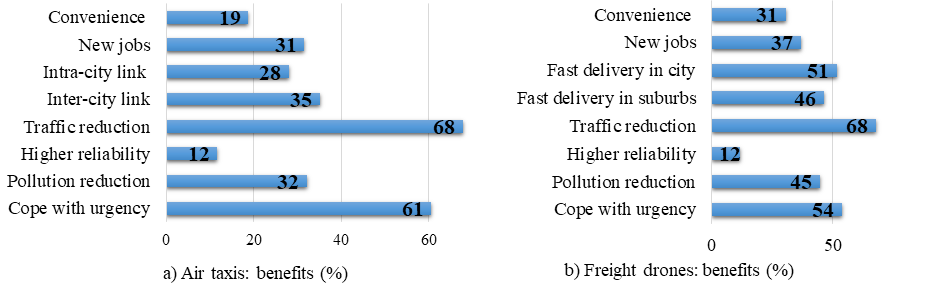
Lastly, people were questioned about the benefits and concerns
related to the adoption of UAM. Benefits The potential to
relieve ground traffic is the most valued benefit. This is followed by
dealing with urgent situations with the help of aerial vehicles, such as
a pre-arrival overview of the situation for a firefighting squad or
inspection in case of environmental disaster. A value of 35 % of
respondents considers air taxis to be an effective solution for
intercity connections. This is the third-ranked option for this use
case, after reducing ground traffic and emergency management, with 68 %
and 61 % of responses respectively (see Figure 12 a)). On the
other hand, the potential for faster delivery in cities is the third
most supported option for the freight use case (51 %), behind reducing
ground traffic and emergency management (68 % and 54 % respectively).
Other benefits mentioned, which were rated less than the aforementioned
ones, are intra-city connections, customized transport/delivery
(inter-city and intra-city delivery in suburbs), and pollution reduction
(see Figure 12 b)).
Figure 11: Benefits of UAM.
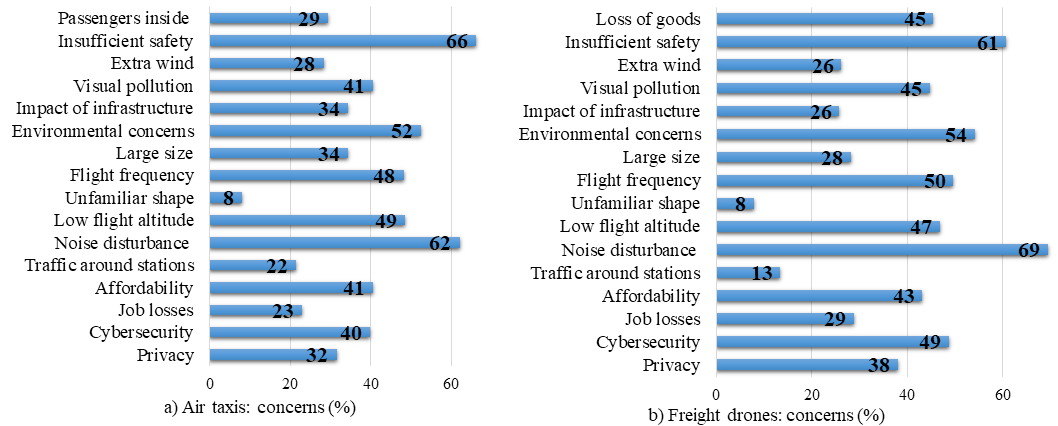
Concerns Inadequate safety, noise annoyance, privacy, and
environmental concerns are considered "macro-level" concerns and are
recognized as important challenges in the development and implementation
of UAM. Instead, visual annoyance, low altitude, and high flight
frequency are "sub-concerns" that are associated with "macro-level"
concerns. The "sub-concerns" have impacts on multiple "macro-level"
concerns. For instance, the high flight frequency of UAM vehicles can
contribute to noise annoyance, safety hazards, privacy invasion, and
environmental disturbance. Such disruptions, respectively, increase the
likelihood of accidents and hazards, reduce comfort levels due to
privacy violations, and disturb wildlife and ecosystems. Therefore,
addressing these "sub-concerns" is essential to identify the root causes
of "macro-level" concerns and mitigate them effectively through targeted
strategies. Noise disturbance and insufficient safety are the most voted
concerns for both use cases (see Figure 11 a) and b)).
The third concern is related to the environmental impact on wildlife.
Concerns about affordability, visual pollution, privacy and
cyber-security, high flight frequency, and low altitude follow with a
minor percentage gap.
Figure 12: Concerns of UAM.
4.2.4 Survey assessment
The survey results show a moderately positive attitude toward the
adoption of UAM. This resulting trend is moderately in accordance with
the outcome of the EASA analysis done for the category of metropolitan
cities ((EASA
2021c)). However, the proportion of positive attitudes is lower:
a share of 59 % of the respondents is described as positive in the
authors’ survey compared to 81 % stated by the EASA in (EASA 2021c). This might
be explained by the more open-minded attitude of inhabitants of
metropolitan cities. The prospect of reducing traffic, of using an
innovative and alternative transport system, or of receiving an ordered
package quickly, could present a relieving scenario that encourages
people to give it a trial. The trend demonstrated in our own survey also
shows accordance with the factors outlined in Section 4.1. Safety levels, noise
emissions, environmental protection, affordability, privacy, and vehicle
configuration are the main concerns that will affect public acceptance
of the UAM system ((Bauranov and
Rakas 2021; Sells 2022)).
5 Discussion
In this section, the legal and social challenges outlined
respectively in the analysis of the current European legal framework
(Section 3) and the assessment of social
acceptance (Section 4) are considered as starting point to
derive UAM design drivers. The comprehensive technical information
presented (Section 2) serves as an enabler of potential
technical solutions, guided by new design drivers, to cope with the
introduced challenges.
Legal challenges can be summarized as an incomplete set of rules,
protocols, and a lack of service providers regarding operations in the
urban environment in order to offer a safe and efficient aerial
transportation service.
Aerial vehicles considered in this work will accommodate presumably at
least one passenger or an equivalent cargo mass and volume.
Operations in the urban environment involve the flight of large and
heavy VTOL configurations over assemblies of people, at lower altitudes
and potentially in BVLOS mode, which requires progressive algorithms.
The proximity to people of such UAM vehicles causes social challenges.
People are mostly concerned about the risk level posed on the ground and
in the air, the noise disturbance and flight frequency, the vehicle
layout, and the type of vehicle control. All these concerns can be
translated into design drivers that often differ from the known set
valid for conventional aviation.
The identified design drivers are examined in the following:
UAM vehicle concepts should assure a high level of system
reliability, generate low noise emissions, be as compact as possible and
carry out safely semi- or fully-autonomous operations.
Configurations, such as multicopter and lift+cruise, have the
potential to be more reliable due to their propulsion architectures that
intrinsically provide a higher level of redundancy. Additional systems,
e.g., advanced and AI-supported communication, navigation, and
detect-and-avoid systems can be installed, accompanied by operational
contingency measures, for instance, automatic emergency landing in order
to enhance the overall safety level.
If certification is done and airworthiness approval is granted by
dedicated authorities only, people’s concern related to safety and
reliability is further mitigated. Furthermore, addressing one single
certification authority centralizes the rulemaking activities. In this
way, the rulemaking process is accelerated and improved.
Optimization of rotor design or installation of ducted rotors can
reduce noise emissions. Moreover, by scheduling flights only during the
day and in specific timeslots, the noise annoyance might be time-wise
concentrated. Society might tolerate this as a daily nuisance. Hence,
innovative rotor solutions and smart scheduling can be utilized to cope
with noise disturbance in the UAM system.
Compact and, at the same time, efficient UAM vehicles are hard to
realize. However, preferring the multicopter configuration might balance
this concern. First, a multicopter is deemed to be the most familiar UAM
configuration for the public, which might potentially relieve the visual
pollution challenge. Second, if this configuration type is enhanced such
that the flight with multicopters is more comfortable for passengers,
providing easy access for disabled individuals or being able to
contribute in emergency situations (e.g., for transport or surveillance)
on a regular basis, multicopters might become an accepted aerial
mobility and service option.
A safe flight operation is essential for the adoption of the UAM
system. Autonomy is, however, identified as a demanding social challenge
accompanied by privacy and cyber-security concerns. This is presumably
due to a low level of knowledge and/or confidence from the public
regarding the technological status quo. In this case, technological
development might only partially help to increase acceptance. Even if
aerial vehicles show to fulfill the required safety level for autonomous
flight and protect personal data as well as prove not to be vulnerable
to hacking, jamming, and spoofing attacks, public acceptance might not
be taken for granted but will probably remain low for some time.
At this point, the potential individual benefits that the UAM service
can offer must be highlighted to target the negative public attitude.
The UAM service may help avoid road and rail congestion and reduce
ground traffic noise and facilitate intra-city transportation as well as
inter-city transfers, e.g., for travelers and commuters, and/or fast
deliveries. All of this can become a profitable business. In order to
achieve this perception of safety and security, public involvement can
help to change the prevailing public opinion by promoting UAM
capabilities and achievements through education and information
campaigns targeting especially potential misconceptions.
An additional concern is related to affordability. People are
negatively predisposed to paying substantially more for UAM services.
Route-optimized design, trip scheduling, and the selection of the most
efficient configuration for a specific trip range can help limit ticket
price premiums resulting in a more affordable service, increasing, in
turn, the willingness of experiencing UAM. Scheduled UAM trips will
probably be the first service type implemented, paving the way for
on-demand UAM transportation at a later stage. Route optimization and
trip scheduling have also an impact on urban planning and infrastructure
design.
People are not inclined to allocate vertiports in the city centre
or in the proximity of residential areas. However, in order to ensure an
efficient and effective UAM service, vertiports must be quickly
user-accessible, otherwise, time-saving can be compromised due to travel
time expenditure to head to the nearest vertiport. In addition, a dense
network of vertiports increases safety, as additional near locations for
a controlled emergency landing are available.
The combined impact of the technical, legal, and social aspects on
each other is shown to act as additional design drivers that could
support the deployment of UAM by addressing current major UAM challenges
from different stakeholder perspectives, respectively that of
regulators, technical experts and the public and calling for mutual
action.
Hence, a massive engagement among these three stakeholder groups is
suggested. The prerequisite of this engagement is regulators that
advance the current state of rules and derive comprehensive future
certification standards for Europe. Within this cooperation, the
technical experts can bring in their technological expertise and may
guide the rulemaking process in order to reach a final set of rules that
is neither too restrictive nor permissive. Furthermore, public
involvement is necessary, first, to reduce the lack of knowledge
concerning UAM, second, to include public feedback and, third, to drive
forward a user-centric and society-balanced UAM development respecting
public concerns. Thus, technical and social inputs conduct retroactively
the rulemaking process. Such a rulemaking process in close collaboration
within the three stakeholder groups has been already initiated for noise
regulation. EASA has recently published a guidance document on noise
measurement and invited VTOL operators to submit their individual
methods and results. Gradually, EASA will derive a formal guideline
based on a repository of received input from the operators and will
issue standards to be applied across Europe by the end of 2023.
Similarly, EASA’s SORA was updated in 2023 to version 2.5, which
includes a quantitative safety level that can help VTOL operators to
evaluate the overall safety level of their VTOL. In addition, the
transition to a highly automated framework for UAM services, consisting
of autonomous eVTOL and semi-automated infrastructure, is underway and
should be completed by the end of 2024.
By applying a similar collaborative process, addressing firstly the use
of advanced algorithms according to European data protection
regulations, and secondly, the urban planning of vertiports in European
cities, the acceptance of these two UAM challenges can be managed and
improved. In summary, UAM systems will be better understood and handled
in the coming years, enabling real-world testing of open UAM systems by
2025.
6 Conclusion
The aim of this paper was to investigate the adoption of Urban Air
Mobility (UAM) from a European perspective, first, by carrying out a
literature review of the state-of-the-art of technical, legal, and
social aspects concerning UAM, and second, by discussing the mutual
influence of these three aspects on the UAM system. The examined UAM
vehicle concepts have been mainly developed since 2010, with several
eVTOL configurations being tested in the meantime. At the conceptual
design stage, comparative analyses can guide the selection of an optimal
configuration as wingless, fixed-wing configurations and hybrid layouts
possess diverse advantages and disadvantages based on the mission
purpose. In terms of energy efficiency, rotorcraft are efficient for
short-range missions, while winged and hybrid configurations are more
suitable for long-range missions. Nevertheless, other aspects such as
reliability, noise emissions, and compactness have to be evaluated when
choosing the ideal configuration. For instance, all configurations (with
the exception of the helicopter layout) are equipped with several
rotors, since this ensures greater redundancy and thus, a lower risk of
hazards. Multiple rotors may, however, generate more noise annoyance. At
the vehicle-level, performance analyses are still under investigation,
e.g., with regard to noise emissions, numerous rotors can be a quieter
sound source than a single or few rotor configurations if they are
properly designed and synchronized or ducted. The fleet-level cost
analysis shows that the Lift + Cruise or tilting concepts allow lower
costs per UAM trip-km. Recharging requirements and requests for longer
UAM flights are contraries to a multirotor design concept. In addition,
ticket prices have been calculated approximately at 2 € per payload vs
trip-kilometer, which conforms to current literature. While the
technical side is progressing rapidly, the legal framework is far from
complete. The European rulemaking activity started in 2017 by EASA and
is ongoing. Despite the remarkable progress achieved so far, especially
for recreational drones, EASA is actively focusing on current UAM
concepts, which are characterized by greater MTOM and size, BVLOS flight
mode, high level of autonomy, and operations over densely populated
areas. These factors represent rulemaking key obstacles that must be
tackled in the coming years in order to accelerate the reliable and safe
deployment of UAM. Social aspects are highly relevant. As an emerging
technology, UAM has not yet entered the market and is therefore not part
of the daily life of the community. Therefore, studies on social aspects
rely on perspectives that may be biased, as respondents have to base
their opinion on an envisaged future UAM scenario. In reviewing the
current state of the art on social acceptance of UAM, the opinion of
mid-sized cities was identified as a research gap to be further
explored. For this reason, the Institute of Aerospace Systems developed
a survey to be distributed in European medium-sized cities and assess
the public opinion on UAM. This survey, combined with EASA’s survey of
European metropolitan areas, allows for a more comprehensive overview of
social acceptance from a European perspective. The overall trend of our
survey on the attitude towards the adoption of UAM complies to a
moderate extent with the trend of EASA’s survey. Specifically, EASA’s
survey showed 81 % of positive opinions compared to 59 % in the own
survey. This inferior percentage is attributed to a potentially more
"cautious" attitude of medium-sized city inhabitants with respect to
technology leaps, despite the fact that the selected cities have a
technical university nearby. The presence of a technical university was
deemed to be a balancing factor with a relevant impact on the final
results. However, this requires further investigation to be confirmed.
The main concerns are acknowledged to be an expected low level of safety
and large noise annoyance, followed by environmental concerns (e.g.,
wildlife), privacy, and cyber-security. The cargo delivery scenario
seems to be more accepted (56 %) than the air taxi scenario (32 %). This
is in contrast with EASA’s survey, whose results outline that air taxis
are more accepted than delivery with aerial vehicles, respectively, 51 %
and 36 %. However, for both scenarios, the trend is negatively reduced
if people were asked to pay a premium for such services. The challenge
of higher prices can be met, for instance, by offering scheduled UAM
trips with route optimization. The benefits of UAM are recognized to be
the reduction of ground traffic congestion and pollution, faster urban
deliveries and connections, and a contribution to coping with
urgency/emergency situations, which is consistent with the main purpose
of UAM development.
Although the moderately positive attitude towards UAM and the
associated benefits that UAM could provide to cities are highly
promising, its deployment is still problematic as the set up of a legal
framework is ongoing and public acceptance needs to be enhanced across
Europe. The proposed holistic analysis combined technical, legal, and
social aspects in order to address the developments and challenges of
UAM from three stakeholder perspectives. By conducting an extensive
literature review of UAM enriched with a cost analysis of UAM services
and a survey on UAM public acceptance, an in-depth understanding of the
UAM system was achieved and UAM-tailored design drivers to tackle the
uncertainty in the adoption of the UAM system were derived. Most
notably, the holistic analysis suggested establishing effective
cooperation among stakeholders. Regulators should advance rules and
certification standards, while technical experts contribute expertise
and guide the rulemaking process. Public involvement is necessary to
cope with concerns and address user-centric UAM development. In Europe,
stakeholder collaboration is already underway with actions for a UAM
framework that ensures low noise disturbance and a high level of safety,
respectively, by 2023 and 2024. By applying a similar collaborative
process with the public for knowledge dissemination on highly automated
vehicles and urban planning of vertiports in European cities, the
acceptance of UAM can be managed and improved. These actions will lead
to an adequate understanding of UAM paving the way to real-world testing
of UAM systems by 2025. This collaborative approach among European
stakeholders can be considered a success for achieving a faster and
flawless UAM deployment in Europe, setting a global benchmark for other
regions to follow.
Future research work will include:
a comprehensive analysis of UAM vehicle efficiency including new
technologies, such as batteries with enhanced energy capacity, hybrid
propulsion systems and, advanced autonomous control systems,
the identification of disturbing noise for humans through a study
of psychoacoustics,
the assessment of the reliability level of UAM vehicles through a
risk analysis and verification of compliance with the
standards,
strategic decision-making with regard to network and vehicle
configuration assessment,
the optimization of total costs for reduction of ticket prices
and enhancement of market shares and revenues in the life-cycle
assessment,
a more in-depth presentation of the survey design and data
usage,
a discussion of collected data with regard to the geographic
distribution and individual perceptions,
a correlation between macro-level and sub-concerns through the
conjoint analysis.
This research project was funded by the Ministry of Culture and
Science of the state of North Rhine-Westphalia with the funding code 327
321-8.03.07-127598 (Project ACCESS!) and by the European Regional
Development Fund (ERDF) with the funding code EFRE-0801700 (Project
URAF).
References
Ahmed, S., G. Fountas, V. Lurkin, P. Anastasopoulos, M. Bierlaire, and
F. Mannering. 2023. “The State of Urban Air Mobility Research: An
Assessment of Challenges and Opportunities.”Social Science
Research Network. https://doi.org/10.2139/ssrn.4341268.
Ajzen, I. 1991. “The Theory of Planned Behavior.”Organizational Behavior and Human Decision Processes 50 (2):
179–211. https://doi.org/10.1016/0749-5978(91)90020-T
.
Al Haddad, C., E. Chaniotakis, A. Straubinger, K. Plötner, and C.
Antoniou. 2020. “Factors Affecting the Adoption and Use of Urban
Air Mobility.”Transportation Research Part A: Policy and
Practice 132: 696–712. https://doi.org/10.1016/j.tra.2019.12.020
.
Babetto, L., B. Kniebel, and E. Stumpf. 2022. “SORA-Based Risk
Assessment for Cargo UAVs in the UAM Framework.”
https://doi.org/10.25967/550082 .
Babetto, L., and E. Stumpf. 2021. “Recent Development of a
Conceptual Design Methodology for Unmanned Aerial Vehicles.”AIAA Aviation 2021 Forum. https://doi.org/10.2514/6.2021-3219.
Bacchini, A., and E. Cestino. 2019. “Electric VTOL Configurations
Comparison.”MDPI Aerospace 6 (3). https://doi.org/10.3390/aerospace6030026
.
Bansal, P., K. Kockelmann, and A. Singh. 2016. “Assessing Public
Opinions of and Interest in New Vehicle Technologies: An Austin
Perspective.”Transportation Research Part C: Emerging
Technologies 67: 1–14. https://doi.org/10.1016/j.trc.2016.01.019.
Bauranov, A., and J. Rakas. 2021. “Designing Airspace for Urban
Air Mobility: A Review of Concepts and Approaches.”Progress
an Aerospace Sciences. https://doi.org/10.1016/j.paerosci.2021.100726.
Berger, Roland. 2022. “Up and Away: Certification for Advanced Air
Mobility Aircraft – a Path to Commercial Certification.”
Brown, A., and W. L. Harris. 2018. “A Vehicle Design and
Optimization Model for on-Demand Aviation.”AIAA Scitech 2018
Forum. https://doi.org/10.3390/su13042217.
Castle, J., C. Fornaro, D. Genovesi, E. Lin, D. Strauss, T. Wadewitz,
and D. Edridge. 2017. “Flying Solo – How Far Are We down the Path
Towards Pilotless Planes.”https://neo.ubs.com/shared/d1ssGmLAVeEB/.
Charness, N., J. Yoon, D. Souders, C. Stothart, and C. Yehert. 2018.
“Predictors of Attitudes Toward Autonomous Vehicles: The Roles of
Age, Gender, Prior Knowledge, and Personality.”Frontiers in
Psychology 9: 2589. https://doi.org/10.3389/fpsyg.2018.02589
.
Chauhan, S. S., and J. R. R. A. Martins. 2019. “Tilt-Wing eVTOL
Takeoff Trajectory Optimization.”Journal of Aircraft 57
(1): 1–20. https://doi.org/10.2514/1.C035476 .
Clothier, R., D. A. Greer, D. G. Greer, and A. Mehta. 2015. “Risk
Perception and the Public Acceptance of Drones.”Risk
Analysis 35 (6): 1167–83. https://doi.org/10.1111/risa.12330
.
Cohen, Adam P, Susan A Shaheen, and Emily M Farrar. 2021. “Urban
Air Mobility: History, Ecosystem, Market Potential, and
Challenges.”IEEE Transactions on Intelligent Transportation
Systems 22 (9): 6074–87.
Cohen, A., S. Shaheen, and E. Farrar. 2021. “Urban Air Mobility:
History, Ecosystem, Market Potential, and Challenges.”IEEE
Transactions on Intelligent Transportation Systems 22 (9).
https://doi.org/10.1109/TITS.2021.3082767
.
Cyber. 2018. “Urban Air Mobility (UAM) Market Study.”
Dannenberger, N., V. Schmid-Loertzer, L. Fischer, V. Schwarzbach, R.
Kellermann, and T. Biehle. 2020. “Verkehrslösung Oder Technikhype?
Ergebnisbericht Zur Einstellung Der Bürgerinnen Und Bürger Gegenüber Dem
Einsatz von Lieferdrohnen Und Flugtaxis Im Städtischen Luftraum in
Deutschland.”https://doi.org/10.13140/RG.2.2.16020.32642
.
Datta, A., S. Elbers, S. Wakayama, J. Alonso, E. Botero, C. Carter, and
F. Martins. 2018. “Commercial Intra-City on-Demand Electric-VTOL
Status of Technology.”NASA Aeronautics Research Institute,
Technical Report TVF WG 2. https://vtol.org/files/dmfile/tvf.wg2.yr2017draft.pdf.
Fagnant, D. J., and K. M. Kockelman. 2018. “Dynamic Ride-Sharing
and Fleet Sizing for a System of Shared Autonomous Vehicles in Austin,
Texas.”Transportation 45 (1): 143–58.
https://doi.org/10.1007/s11116-016-9729-z
.
Fredericks, W. L., S. Sripad, G. C. Bower, and V. Viswanathan. 2018.
“Performance Metrics Required of Next-Generation Batteries to
Electrify Vertical Takeoff and Landing (VTOL) Aircraft.”ACS
Energy Letters 3: 2989–94. https://doi.org/10.2021/acsenergylett.8b02195.
Fu, M., R. Rothfeld, and C. Antoniou. 2019. “Exploring Preferences
for Transportation Modes in an Urban Air Mobility Environment: Munich
Case Study.”Transportation Research Record: Journal of the
Transportation Research Board 2673 (10): 427–42. https://doi.org/10.1177/0361198119843858
.
Garrow, L. A., B. J. German, and C. E. Leonard. 2021. “Urban Air
Mobility: A Comprehensive Review and Comparative Analysis with
Autonomous and Electric Ground Transportation for Informing Future
Research.”Transportation Research Part C: Emerging
Technologies.
Giannini, F., A. Kaufman, and M. Kearney. 2018. “Configuration
Development and Subscale Flight Testing of an Urban Mobility
eVTOL.”Proceedings of the AHS International Technical
Meeting on Aeromechanics Design for Transformative Vertical Flight,
American Helicopter Society International.
Giffinger, R., C. Fertner, H. Kramar, and E. Meijers. 2007.
“City-Ranking of European Medium-Sized Cities.”
Hoffmann, Gabriel, Haomiao Huang, Steven Waslander, and Claire Tomlin.
2007. “Quadrotor Helicopter Flight Dynamics and Control: Theory
and Experiment.”AIAA Guidance, Navigation and Control
Conference and Exhibit, 6461.
Husemann, M., A. Kirste, and E. Stumpf. 2023. “Analysis of
Cost-Efficient Urban Air Mobility Systems: Optimization of Operational
and Configurational Fleet Decisions.”European Journal of
Operational Research. https://doi.org/10.1016/j.ejor.2023.04.040
.
Kadhiresan, Akshay R, and Michael J Duffy. 2019. “Conceptual
Design and Mission Analysis for eVTOL Urban Air Mobility Flight Vehicle
Configurations.”AIAA Aviation 2019 Forum, 2873.
https://doi.org/10.2514/6.2019-2873 .
Kasliwal, A., N. J. Furbush, J. H. Gawron, J. R. McBride, T. J.
Wallington, R. D. Kleine, H. C. Kim, and G. A. Keoleian. 2019.
“The Role of Flying Cars in Sustainable Mobility.”Nature Communications 10 (1). https://doi.org/10.1038/s41467-019-09426-0
.
Keller, M., S. Hulínská, and Kraus J. 2021. “Integration of UAM
into Cities – the Public View.” Edited by Elsevier.
Transportation Research Procedia 59: 137–43. https://doi.org/10.1016/j.
trpro.2021.11.105.
Kellermann, R., T. Biehle, and L. Fischer. 2020. “Drones for
Parcel and Passenger Transportation: A Literature Review.”Transportation Research Interdisciplinary Perspectives 4:
100088. https://doi.org/10.1016/j.trip.2019.100088
.
Kirste, A., Michael Husemann, and Eike Stumpf. 2022. “Analysis and
Evaluation of Urban Air Mobility Fleet Operations Using Agent-Based
Transportation Simulation [Paper Presentation].”Deutscher
Luft- Und Raumfahrtkongress 2022, September.
Kraenzler, Matthias, Manfred Schmitt, and Eike Stumpf. 2019.
“Conceptual Design Study on Electrical Vertical Take Off and
Landing Aircraft for Urban Air Mobility Applications.”AIAA
Aviation 2019 Forum, 3124. https://doi.org/10.2514/6.2019-3124.
Krueger, R., T. Rashidi, and J. Rose. 2016. “Preferences for
Shared Autonomous Vehicles.”Transportation Research Part C:
Emerging Technologies 69: 343–55. https://doi.org/10.1016/j.trc.2016.06.015
.
Lee, B. S., A. Tullu, and H. Y. Hwang. 2020. “Optimal Design and
Design Parameter Sensitivity Analyses of an EVTOL PAV in the Conceptual
Design Phase.”Journal of Applied Sciences 10 (15).
https://doi.org/10.3390/app10155112 .
Lotz, V., A. Kirste, C. Lidynia, M. Ziefle, and E. Stumpf. 2023.
“User Acceptance of Urban Air Mobility (UAM) for Passenger
Transport: A Choice Based Conjoint Study.”Human–Computer
Interaction International 2023 Conference.
Marzouk, Osama A. 2022. “Urban Air Mobility and Flying Cars:
Overview, Examples, Prospects, Drawbacks, and Solutions.”Open Engineering 12 (1): 662–79. https://doi.org/10.1515/eng-2022-0379.
McDonald, R, and B German. 2017. “eVTOL Stored Energy
Overview.”Uber Elevate Summit 2017.
Melo, S. P., F. Cerdas, A. Barke, C. Thies, T. S. Spengler, and C.
Herrmann. 2020. “Life Cycle Engineering of Future Aircraft
Systems: The Case of eVTOL Vehicles.”Procedia CIRP 90:
297–302. https://doi.org/10.1016/j.
procir.2020.01.060.
Mitchell, D. G., D. H. Klyde, M. Shubert, D. Sizoo, and Schaller R.
2022. “Testing for Certification of Urban Air Mobility
Vehicles.”https://doi.org/10.2514/6.2022-0889.
NASA. 2018. “Urban Air Mobility (UAM) – Market Study.”
Nikodem, F., J. S. Dittrich, and A Bierig. 2018. “The New Specific
Operations Risk Assessment Approach for UAV Regulation Compared to
Common Civil Aviation Risk Assessment.”https://elib.dlr.de/121660/1/SORA\_DLRK\_final.pdf.
Pettke, G, W Kozyro, P Gałka, G Trzeciak, and P Wołejsza. 2021.
“Certification of Unmanned Aircraft (UA).”TransNav:
International Journal on Marine Navigation and Safety of Sea
Transportation 15 (1): 143–55.
Polaczyk, Nicholas, Enzo Trombino, Peng Wei, and Mihaela Mitici. 2019.
“A Review of Current Technology and Research in Urban on-Demand
Air Mobility Applications.”8th Biennial Autonomous VTOL
Technical Meeting and 6th Annual Electric VTOL Symposium, 333–43.
Pons-Prats, J., T. Živojinović, and J. Kuljanin. 2022. “On the
Understanding of the Current Status of Urban Air Mobility Development
and Its Future Prospects: Commuting in a Flying Vehicle as a New
Paradigm.”Transportation Research Part E. https://doi.org/10.1016/j.tre.2022.102868
.
Reiche, C.., R. Goyal, A. Cohen, J. Serrao, S. Kimmel, C. Fernando, and
S. Shaheen. 2018. “Urban Air Mobility Market Study.”https://doi.org/10.7922/G2ZS2TRG
.
Rothfeld, R, M. Balac, K. Ploetner, and C. Antoniou. 2018.
“Initial Analysis for Urban Air Mobility’s Transport Performance
in Sioux Falls.”2018 Aviation Technology, Integration, and
Operations Conference. https://doi.org/10.2514/6.
2018-2886.
Rothfeld, R., M. Fu, M. Balac, and C. Antoniou. 2021. “Potential
Urban Air Mobility Travel Time Savings: An Exploratory Analysis of
Munich, Paris, and San Francisco.”Sustainability 13
(4): 297–302. https://doi.org/10.3390/su13042217
.
Schäfer, M., and D. Keppler. 2013. “Modelle Der
Technikorientierten Akzeptanzforschung, Überblick Und Reflexion Am
Beispiel Eines Forschungsprojekts Zur Implementierung Innovativer
Technischer Energieeffizienz-Maßnahmen.”
Schuh, G., L. Krebs, L. Babetto, B. Kniebel, M. Spangenberg, and Stumpf
E. 2022. “Technical and Legal Boundary Conditions for the
Extension of the Air Cargo Logistics Chain by UAVs into the City
Centre.”https://doi.org/10.25967/550082.
Shaheen, S., A. Cohen, and E. Farrar. 2018. “The Potential
Societal Barriers of Urban Air Mobility (Uam).”
https://doi.org/10.7922/G28C9 TFR.
Silva, Christopher, Wayne R Johnson, Eduardo Solis, Michael D Patterson,
and Kevin R Antcliff. 2018. “VTOL Urban Air Mobility Concept
Vehicles for Technology Development.”2018 Aviation
Technology, Integration, and Operations Conference.
Slovic, P., B. Fischhoff, and S. Lichtenstein. 1982. “Why Study
Risk Perception?”Risk Analysis 2 (2): 83–93.
https://doi.org/10.1111/j.1539-6924.1982.tb01369.x
.
Straubinger, Anna, Raoul Rothfeld, Michael Shamiyeh, Kai-Daniel Büchter,
Jochen Kaiser, and Kay Olaf Plötner. 2020. “An Overview of Current
Research and Developments in Urban Air Mobility–Setting the Scene for
UAM Introduction.”Journal of Air Transport Management
87: 101852.
Sun, X., S. Wandelt, M. Husemann, and E. Stumpf. 2021.
“Operational Considerations Regarding on-Demand Air Mobility: A
Literature Review and Research Challenges.”Journal of
Advanced Transportation.
Tepylo, R., A. Straubinger, and J. Laliberte. 2023. “Public
Perception of Advanced Aviation Technologies: A Review and Roadmap to
Acceptance.”Progress in Aerospace Sciences 138: 100899.
https://doi.org/10.1016/j.
paerosci.2023.100899 .